

快速自航模虚拟试验
Fast Free Running Model Ship Virtual Test试验介绍
开始试验1.功能介绍
本产品核心求解器采用基于三维Rankine源的面元法,计算高效,融合了参数设置专家智慧,操作简单易用,满足初步设计阶段船舶操纵性评估需求。
主要功能有:
船舶斜航、圆周运动虚拟试验;
回转特征参数预报;
Z形试验特征参数预报;
适用于集装箱船、散货船和油船等主力船型;
2.产品特色
本产品核心求解器采用基于三维Rankine源的面元法:
采用了非线性自由面条件;
适应三边形和四边形面元;
不同船型计算稳定性好;
( 1)核心求解器采用基于三维Rankine源的面元法
测试结果获得了国际标模KVLCC2、项目组标模等物模试验验证;
非线性自由面条件;
适应三边形和四边形面元
面元网格自动生成功能
兼容Gambit网格文件。

(2)试验结果分析
可给出操纵特征参数;
试验报告自动生成;
3.运行环境和效率
主流PC机上即可运行;Windows操作系统,高性能计算集群上也可运行。 Windows操作系统,采用虚拟化技术,动态分配资源,满足计算所需。 计算速度快,PC机上计算单条船约10分钟。
4.试验精度
测试结果获得了国际标模、项目组标模等物模试验验证。计算结果与国际标模KVLCC2相比,纵距、战术直径和超越角的计算精度分别在11.2%、12.5%和1度以内。
典型案例
开始试验(一)案例一快速自航模虚拟试验-油船
1.1 案例名称
案例试验-快速自航模虚拟试验-油船
1.2 案例描述
试验油船为11.5k阿芙拉油船
1.3 试验结果
① 左回转-纵距、回转直径。
② 右回转-纵距、回转直径。
③ 左10°z形试验,第一超越角度和第二超越角。
④ 右10°z形试验,第一超越角度和第二超越角。
⑤ 左20°z形试验,第一超越角度。
⑥ 右20°z形试验,第一超越角度。
1.4 重要模型和参数
| 项目 | 值 |
|---|---|
| 船长Lpp(m) | 240.0 |
| 船宽B(m) | 44.0 |
| 吃水T(m) | 15.0 |
| 绕垂直轴惯量IzG(kgm2) | 1.0105004900232E10 |
| 重心纵向坐标xGm | 8.679 |
| 方形系数CB | 0.8258 |
| 服务航速VS(kn) | 14.0 |
| 项目 | 值 |
|---|---|
| 螺旋桨直径Dp(m) | 8.4 |
| 螺旋桨转速n P(rps) | 5.0 |
| 项目 | 值 |
|---|---|
| 舵高HR(m) | 11.6 |
| 舵宽BR(m) | 6.842 |
| 舵转速(°/s) | 4.0 |
1.5 部分试验结果展示
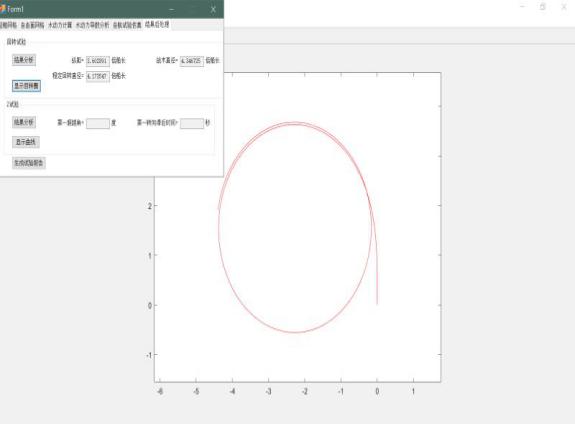
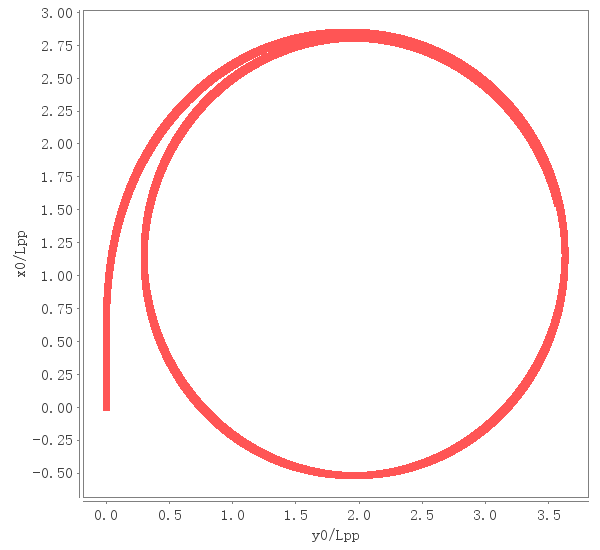
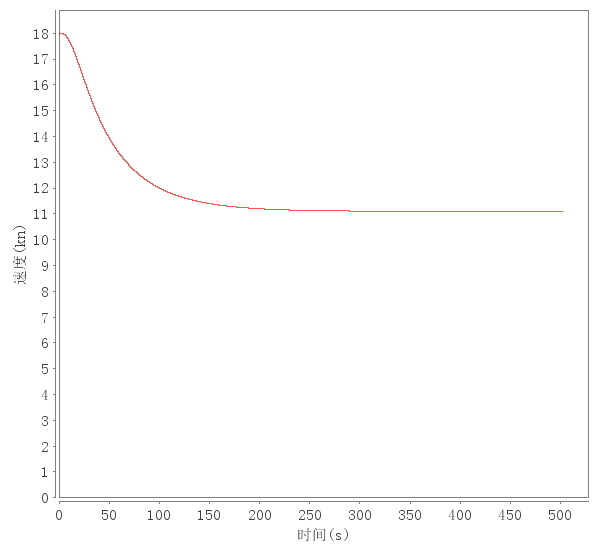
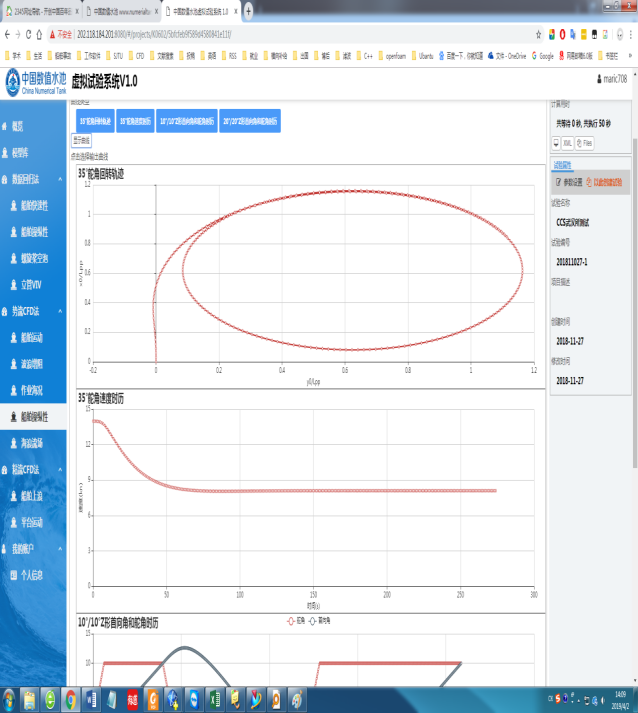
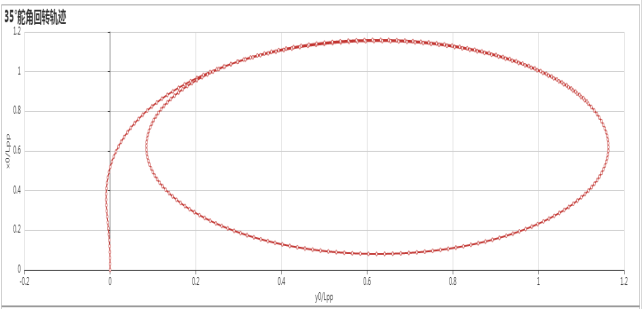
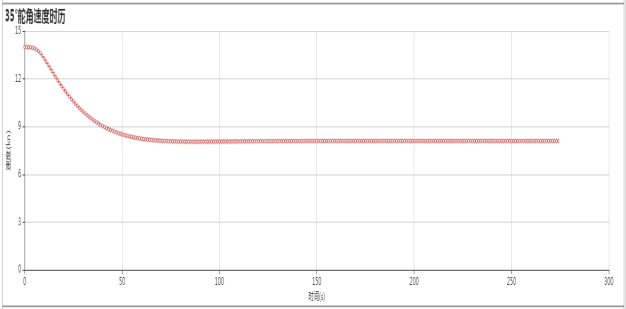
回转试验进行了舵35°试验。试验中给出了船舶重心点运动轨迹和回转中的战术直径、定常回转直径、纵距并给予相应的检验。
| 项目 | 值 | IMO标准 |
|---|---|---|
| 战术直径 | 1.20LPP | <5.0LPP |
| 定常回转直径 | 1.08LPP | - |
| 纵距 | 1.10LPP | <4.5LPP |

35°舵角回转轨迹

35°舵角速度时历
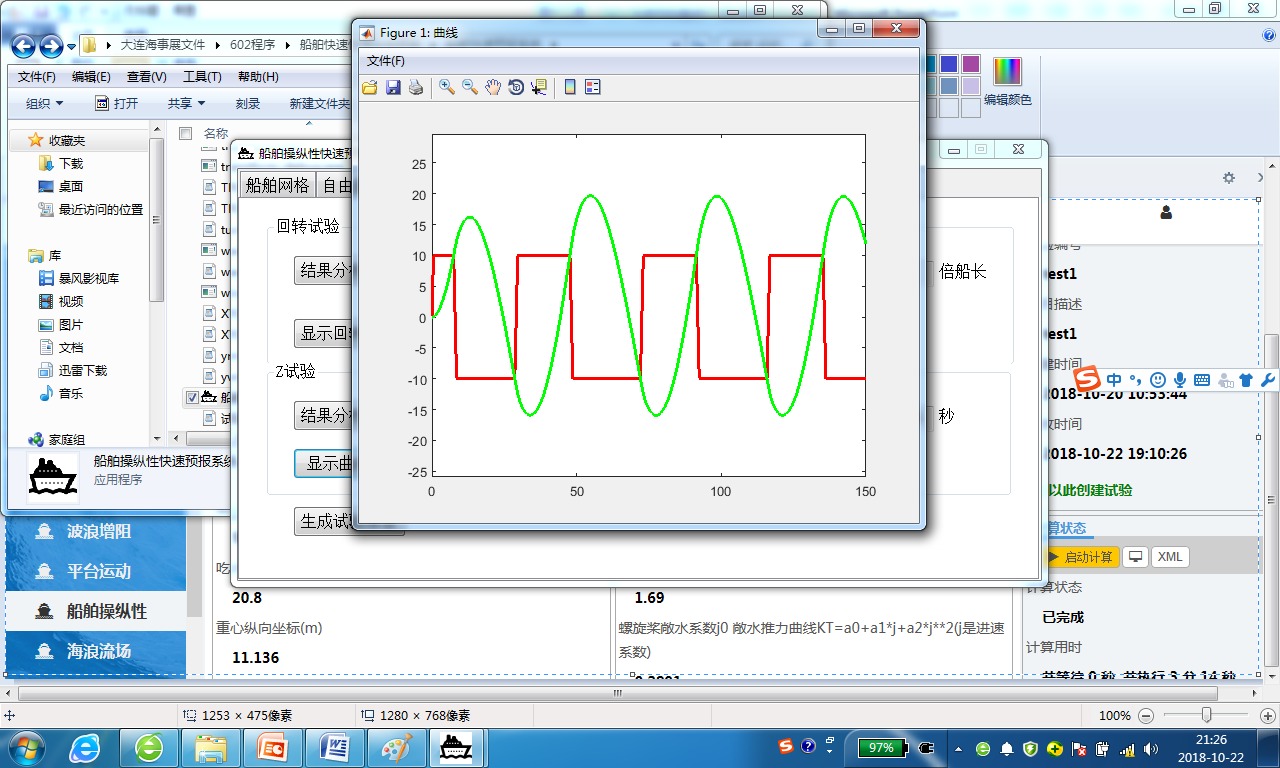
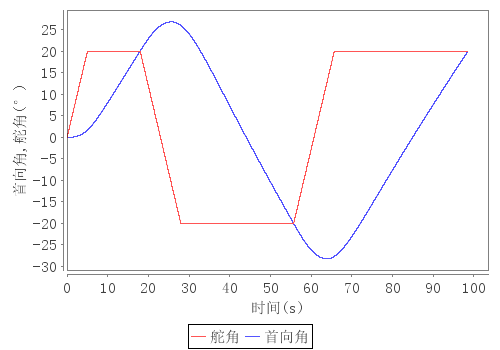
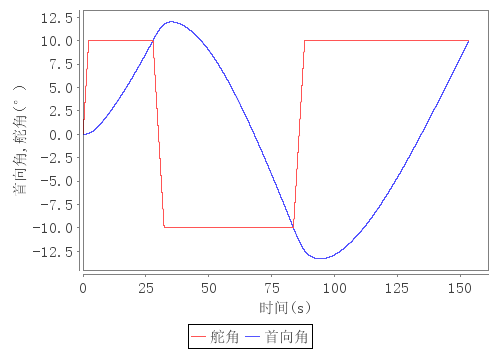
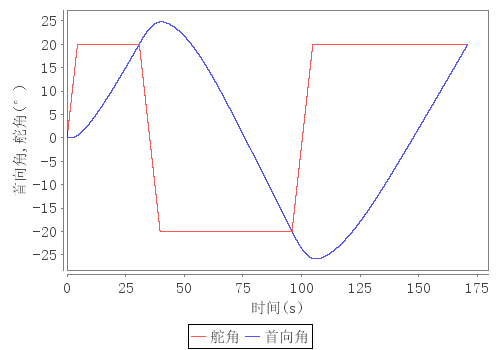
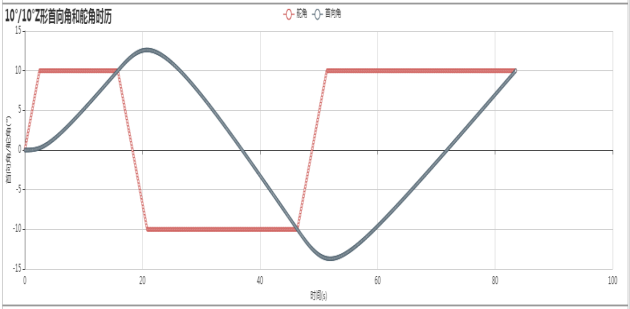
10°/10°和20°/20°z形试验的试验结果。
| 项目 | 值 | IMO标准 | |
|---|---|---|---|
| 10°/10° | 第一超越角(°) | 2.50 | <10 |
| 第二超越角(°) | 2.70 | <15 | |
| 20°/20° | 第一超越角(°) | 6.40 | <25 |
| 第二超越角(°) | 7.30 |

图3.3 10°/10°Z形首向角和舵角时历
20°/20°Z形首向角和舵角时历
(二)案例二-快速自航模虚拟试验-散货船
1.1 案例名称
案例试验-快速自航模虚拟试验-散货船
1.2 案例描述
试验散货船为育鹏轮
1.3 试验结果
① 左回转-纵距、回转直径。
② 右回转-纵距、回转直径。
③ 左10°z形试验,第一超越角度和第二超越角。
④ 右10°z形试验,第一超越角度和第二超越角。
⑤ 左20°z形试验,第一超越角度。
⑥ 右20°z形试验,第一超越角度。
1.4 重要模型和参数
| 项目 | 值 |
|---|---|
| 船长Lpp(m) | 189.0 |
| 船宽B(m) | 27.8 |
| 吃水T(m) | 10.3 |
| 绕垂直轴惯量IzG(kgm2) | 2.72872704251E7 |
| 重心纵向坐标xGm | 0.826 |
| 方形系数CB | 0.721 |
| 服务航速VS(kn) | 18.0 |
| 项目 | 值 |
|---|---|
| 螺旋桨直径Dp(m) | 6.7 |
| 螺旋桨转速n P(rps) | 2.5 |
| 项目 | 值 |
|---|---|
| 舵高HR(m) | 8.9 |
| 舵宽BR(m) | 4.6 |
| 舵转速(°/s) | 4.5 |
1.5 部分试验结果展示
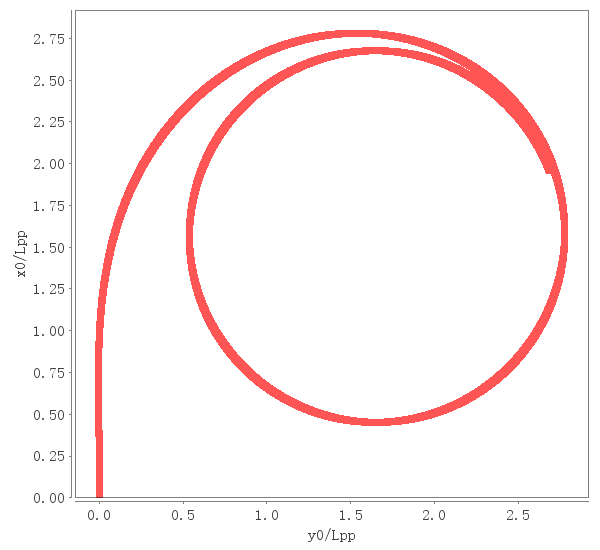
回转试验进行了舵35°试验。试验中给出了船舶重心点运动轨迹和回转中的战术直径、定常回转直径、纵距并给予相应的检验。
| 项目 | 值 | IMO标准 |
|---|---|---|
| 战术直径 | 3.50LPP | <5.0LPP |
| 定常回转直径 | 3.10LPP | - |
| 纵距 | 2.75LPP | <4.5LPP |
35°舵角回转轨迹
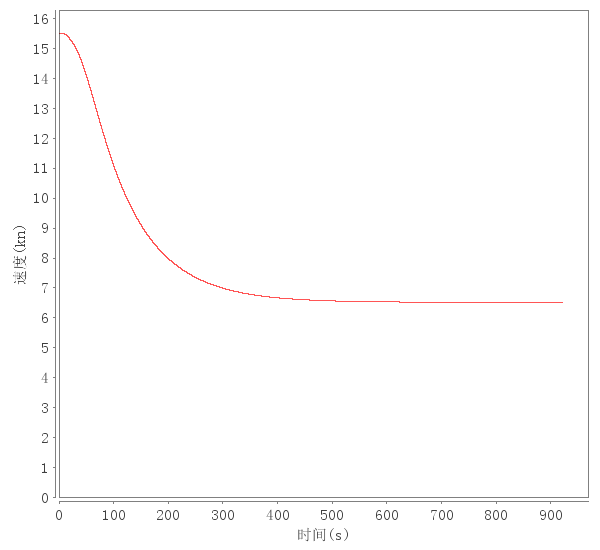
35°舵角速度时历
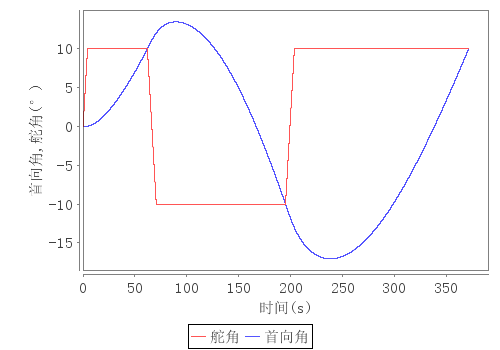
1.5.1 Z形试验
10°/10°和20°/20°z形试验的试验结果。
| 项目 | 值 | IMO标准 | |
|---|---|---|---|
| 10°/10° | 第一超越角(°) | 1.80 | <10 |
| 第二超越角(°) | 2.60 | <15 | |
| 20°/20° | 第一超越角(°) | 4.95 | <25 |
| 第二超越角(°) | 5.30 | - |
10°/10°Z形首向角和舵角时历
20°/20°Z形首向角和舵角时历
(三)案例二-快速自航模虚拟试验-油船
1.1 案例名称
案例试验-快速自航模虚拟试验-油船
1.2 案例描述
试验为KVLCC2油船
1.3 试验结果
① 左回转-纵距、回转直径。
② 右回转-纵距、回转直径。
③ 左10°z形试验,第一超越角度和第二超越角。
④ 右10°z形试验,第一超越角度和第二超越角。
⑤ 左20°z形试验,第一超越角度。
⑥ 右20°z形试验,第一超越角度。
1.4 重要模型和参数
| 项目 | 值 |
|---|---|
| 船长Lpp(m) | 320.0 |
| 船宽B(m) | 58.0 |
| 吃水T(m) | 20.8 |
| 绕垂直轴惯量IzG(kgm2) | 2.0007808E12 |
| 重心纵向坐标xGm | 11.136 |
| 方形系数CB | 0.809 |
| 服务航速VS(kn) | 15.5 |
| 项目 | 值 |
|---|---|
| 螺旋桨直径Dp(m) | 9.86 |
| 螺旋桨转速n P(rps) | 1.69 |
| 项目 | 值 |
|---|---|
| 舵高HR(m) | 15.84 |
| 舵宽BR(m) | 8.65 |
| 舵转速(°/s) | 2.34 |
1.5 部分试验结果展示
回转试验进行了舵35o试验。试验中给出了船舶重心点运动轨迹和回转中的战术直径、定常回转直径、纵距并给予相应的检验。
| 项目 | 值 | IMO标准 |
|---|---|---|
| 战术直径 | 2.47LPP | <5.0LPP |
| 定常回转直径 | 2.22LPP | - |
| 纵距 | 2.84LPP | <4.5LPP |
35°舵角回转轨迹
35°舵角速度时历
1.5.1 Z形试验
10°/10°和20°/20°z形试验的试验结果。
| 项目 | 值 | IMO标准 | |
|---|---|---|---|
| 10°/10° | 第一超越角(°) | 3.87 | <10 |
| 第二超越角(°) | 5.73 | <15 | |
| 20°/20° | 第一超越角(°) | 3.87 | <25 |
| 第二超越角(°) | 5.73 | - |
10°/10°Z形首向角和舵角时历
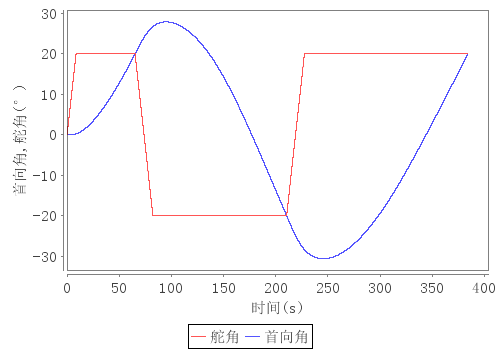
20°/20°Z形首向角和舵角时历
操作指南
开始试验用户登录中国数值水池虚拟试验系统后,可完成系统提供的各类虚拟试验。虽然试验在参数、求解器、计算结果等方面区别很大,但总体上来说操作过程基本相同,主要由四个部分组成:1试验创建;2参数录入(前处理);3计算求解;4结果展示(后处理)。
登录系统后,点击页面左侧导航栏中的“船舶操纵性”,从而进入该试验的管理页面。如下图所示,该页面有关于船舶操纵性预报的主要功能介绍,以及该虚拟试验的相关特色,其下为“我的试验”。
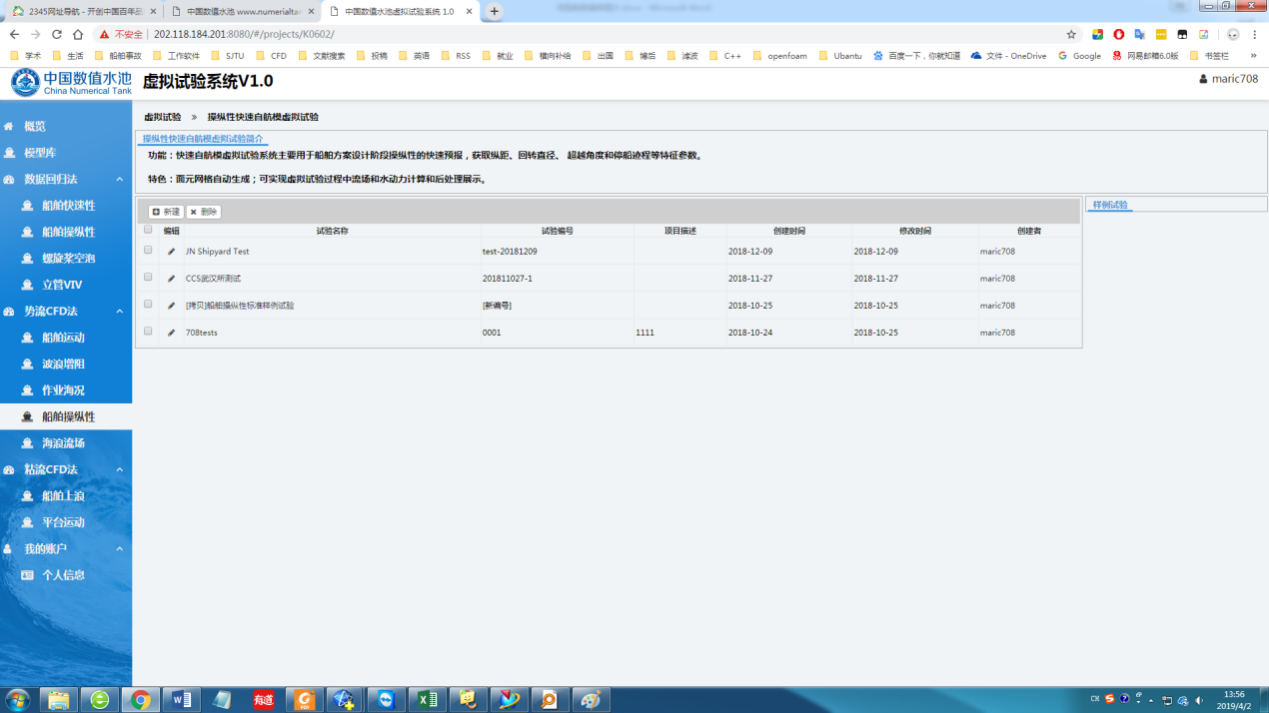
“我的试验”中给出用户做过的试验列表,该列表以时间顺序排序,可以在看到用户做的每一个虚拟试验的概要信息,如试验名称、编号、描述、创建时间、修改时间等内容,用户可在这里对试验进行创建核删除操作。
页面的右侧是船舶操纵性预报的“样例试验”,如下图所示。样例试验是系统提供的已经完成的典型试验,对系统中的所有注册用户开放,可给用户提供一定的参考,从而更好地完成自己的虚拟试验。
点击“样例试验”后,则进入样例试验的详情界面,可以看到样例试验的参数设置、求解器的执行信息及试验的结果。这里,用户可以查看样例的所有信息,但不可以修改。
1.试验创建
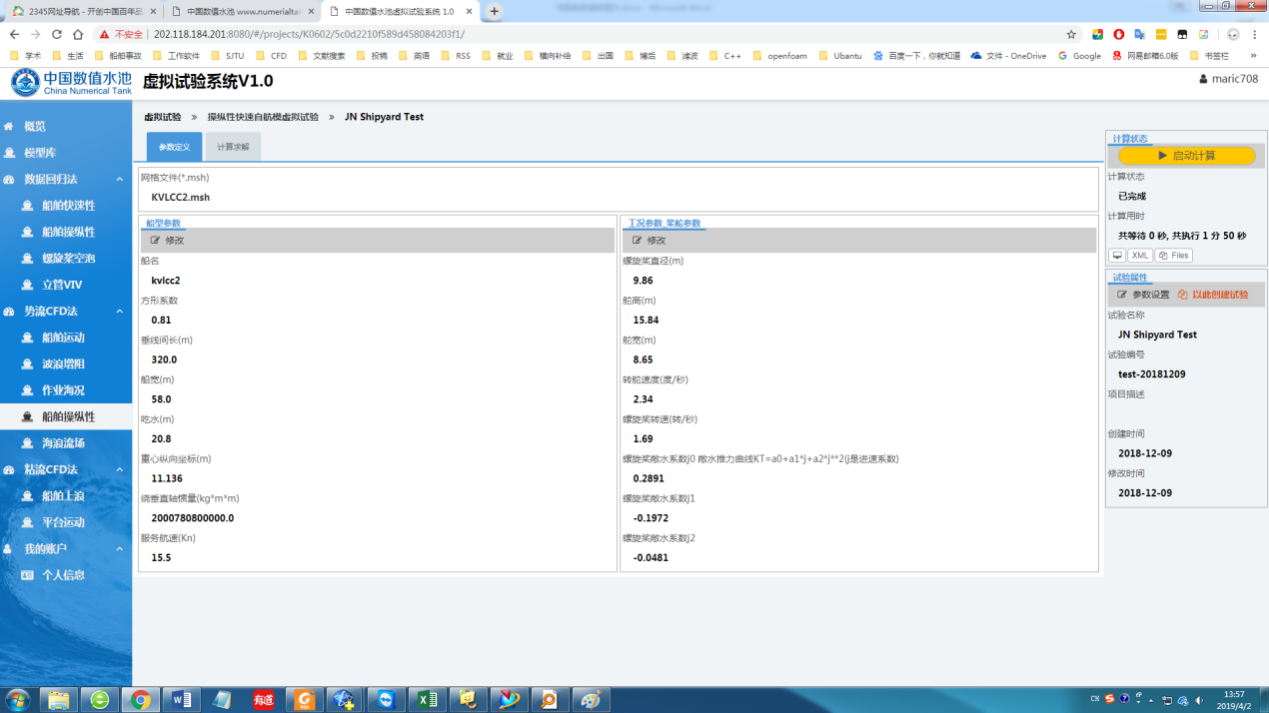
系统提供了两种创建虚拟试验的方法,第一种是通过某个虚拟试验为范本来创建虚拟试验。如下图所示,点开某个虚拟试验的详情页面,在这个页面的右侧用红色字体标出的字样“以此创建试验”,则弹出创建新试验的对话框,输入适当的试验名称、编号及描述,点击确定即可完成新试验的创建。
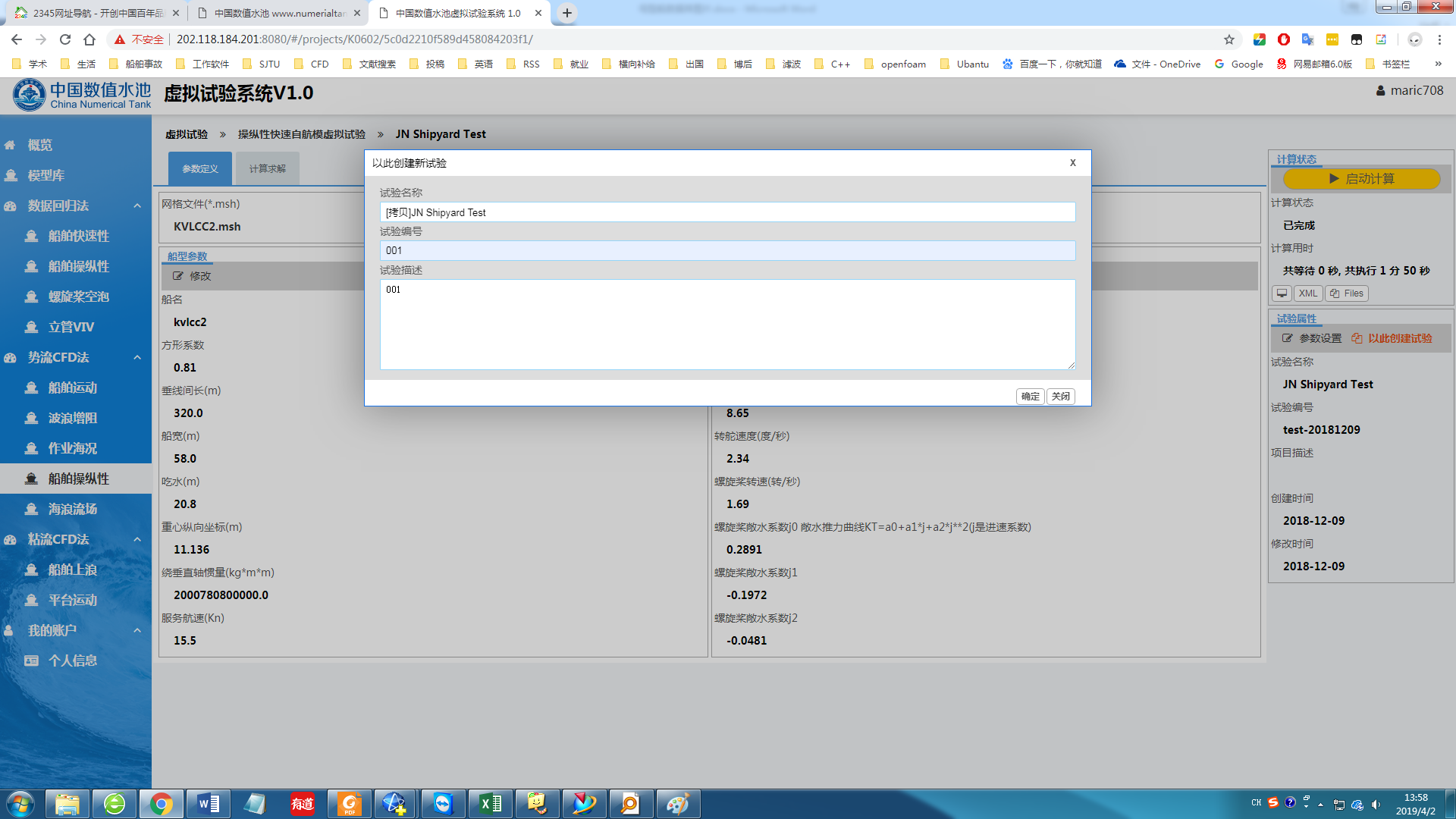
如下图所示,新试验创建后桨自动跳转到该试验的详情页面,可见通过这种方式创建的新试验是样例试验的一个拷贝,其参数与样例试验相同,用户只需按实际情况修改部分参数即可。因此,可将当前虚拟试验看成试验模板,起到初始化设定新试验参数的作用,系统推荐通过这样的方式来创建新的虚拟试验。

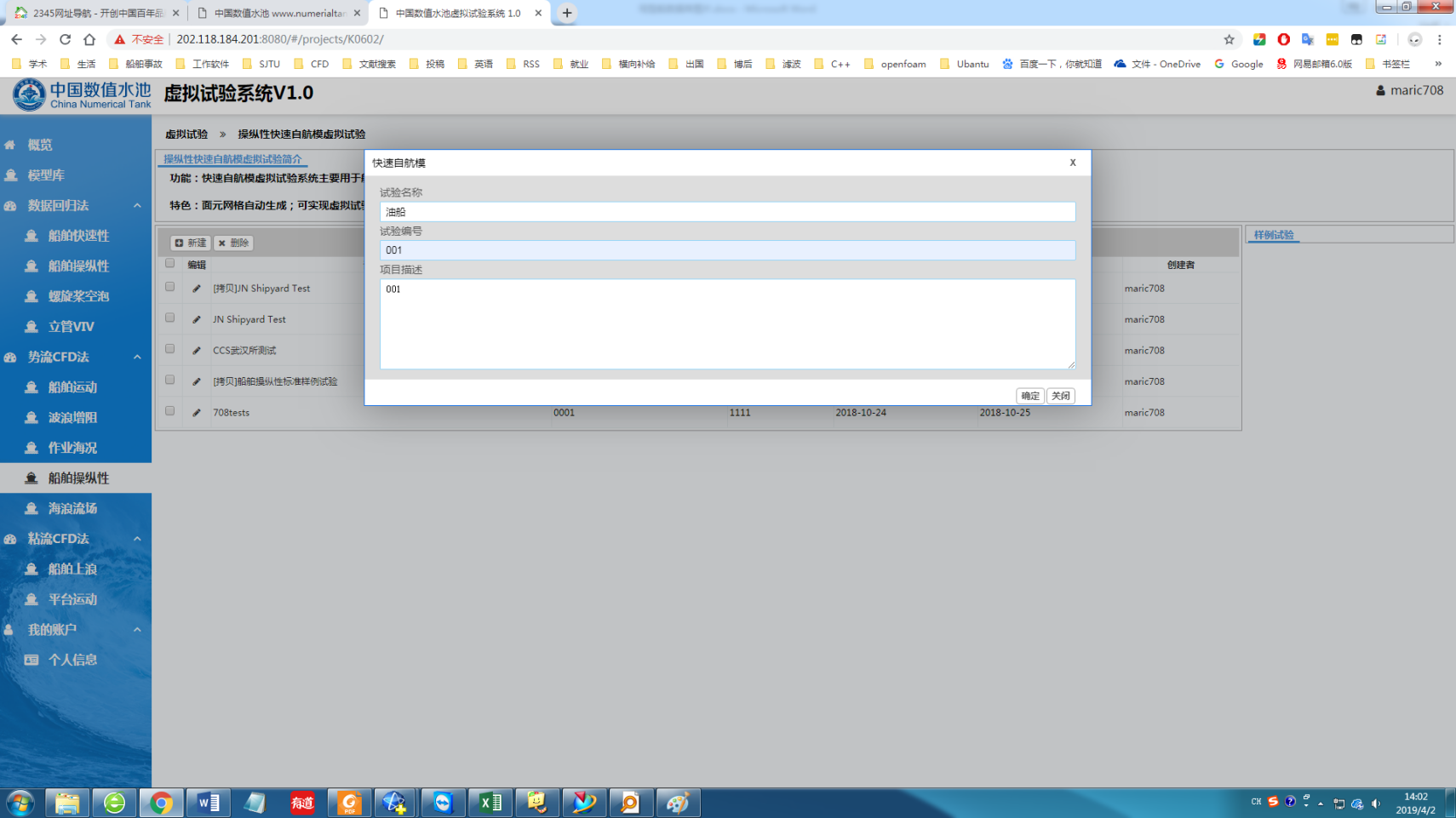
第二种创建新试验的方法是创建一个空白试验。如下图所示,通过点击“船舶操纵性预报”中虚拟试验列表上方的“新建”按钮,同样会弹出对话框如下图。填入相应的信息,然后点击确定,即可创建一个新的空白试验。
如下图所示,新空白试验创建后,同样会自动跳转到该虚拟试验的详情页面。可见通过该方法创建的所有虚拟试验都是空白,需要用户手动输入所有的必填参数,方可进行计算,该方法适用于有一定经验的用户。
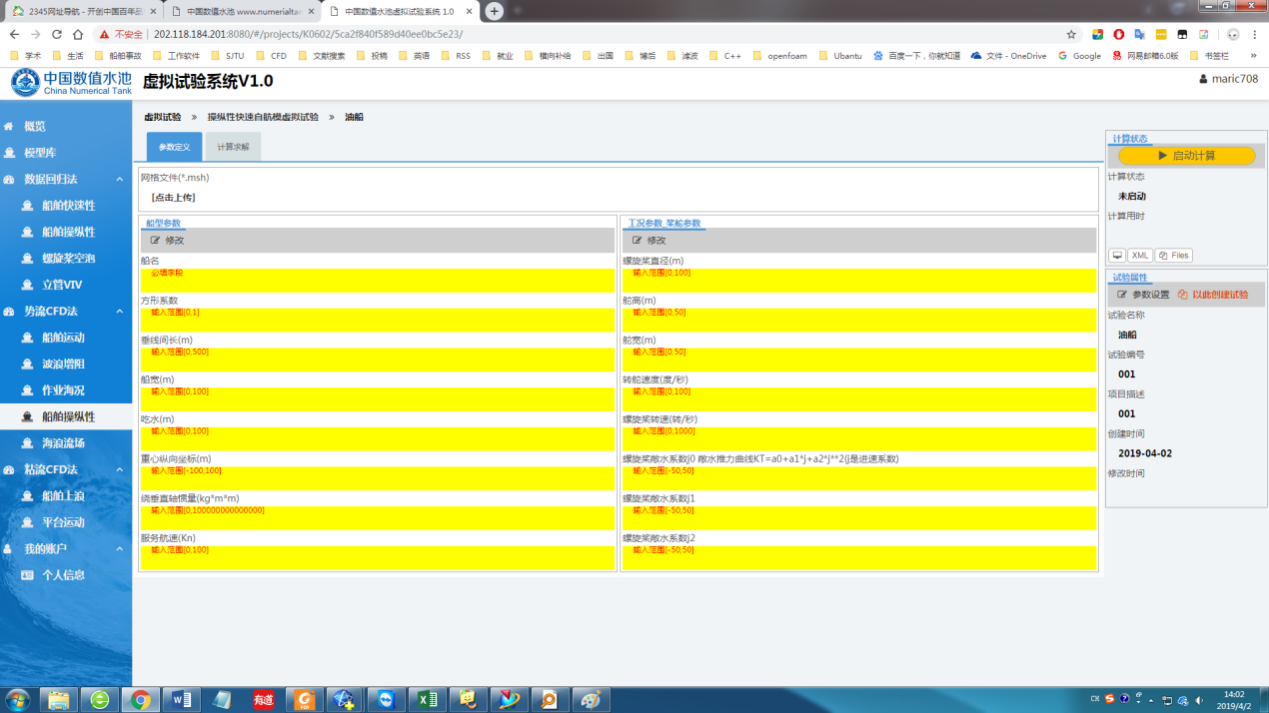
2. 参数录入
当一个新的虚拟试验创建口,用户需要对其参数进行适当的录入或修改,为确保结果的准确,请确认所录入的参数符合实际情况。一个虚拟试验可大致分为文件型参数、单数值型参数、表格型参数几种类型,介绍一下各种类型参数的录入方式。
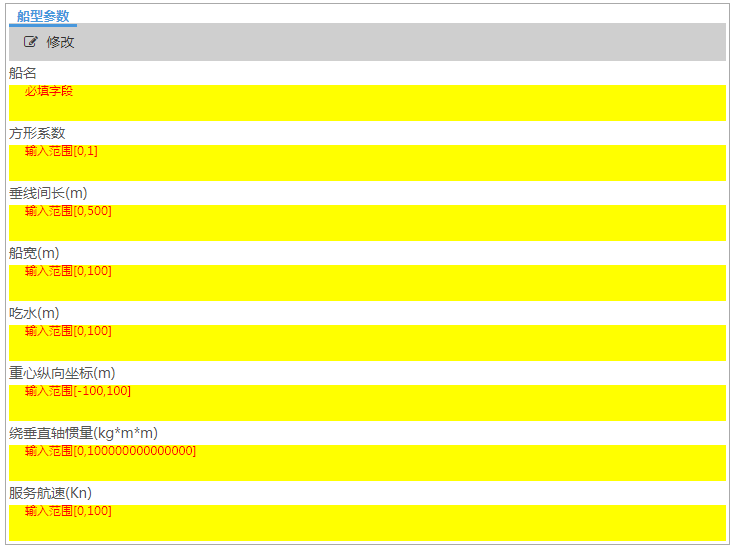
2.1 船型参数
在“输入”标签中,点击“船型参数”小标签下方的“修改”按钮,可进入如下图所示页面,可以进行与船型相关参数的设置。按照所提示的信息输入正确的船型参数。其中船舶类型为下来菜单,不需要用户输入,其余参数都需要用户手动输入。
2.2 螺旋桨参数
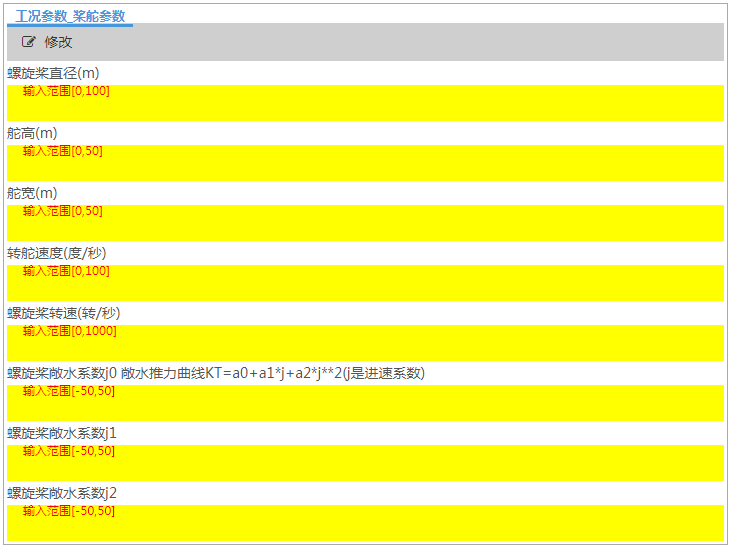
点击“螺旋桨参数”小标签下方的“修改”按钮,可进入如下图所示页面,可以对螺旋桨相关的参数进行设置,以下所有参数都需要用户手动输入。
3. 计算求解
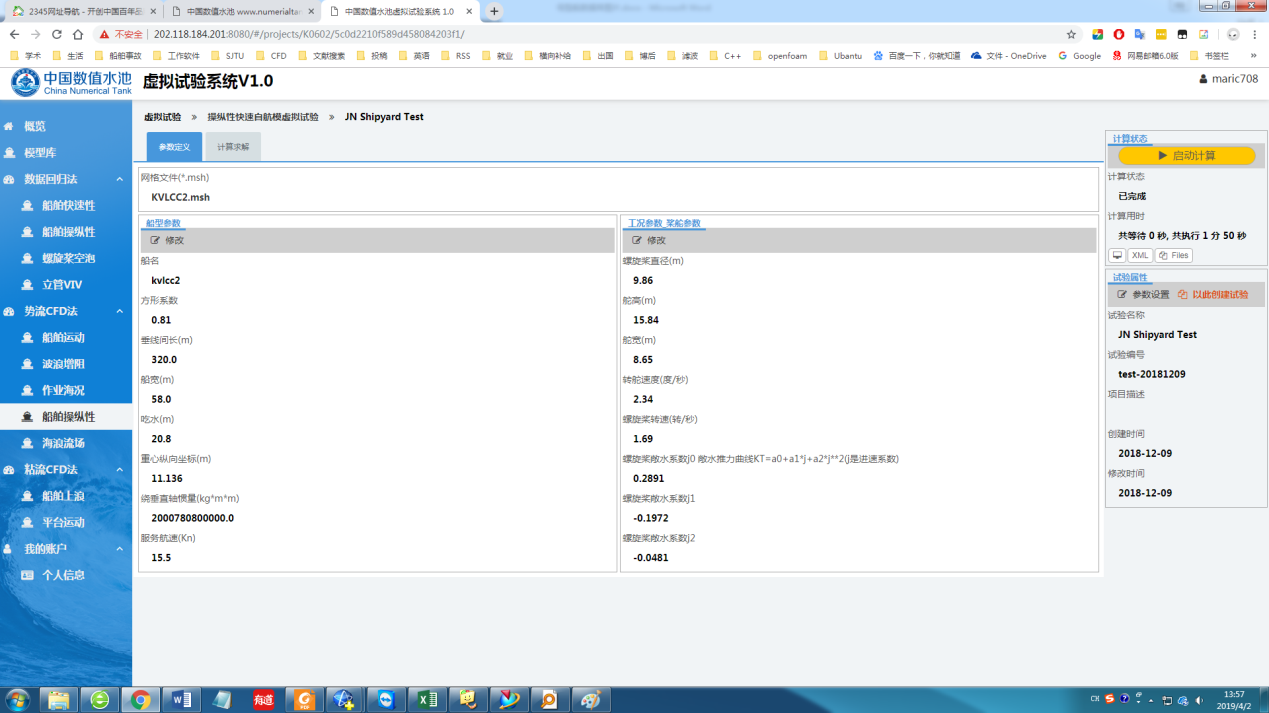
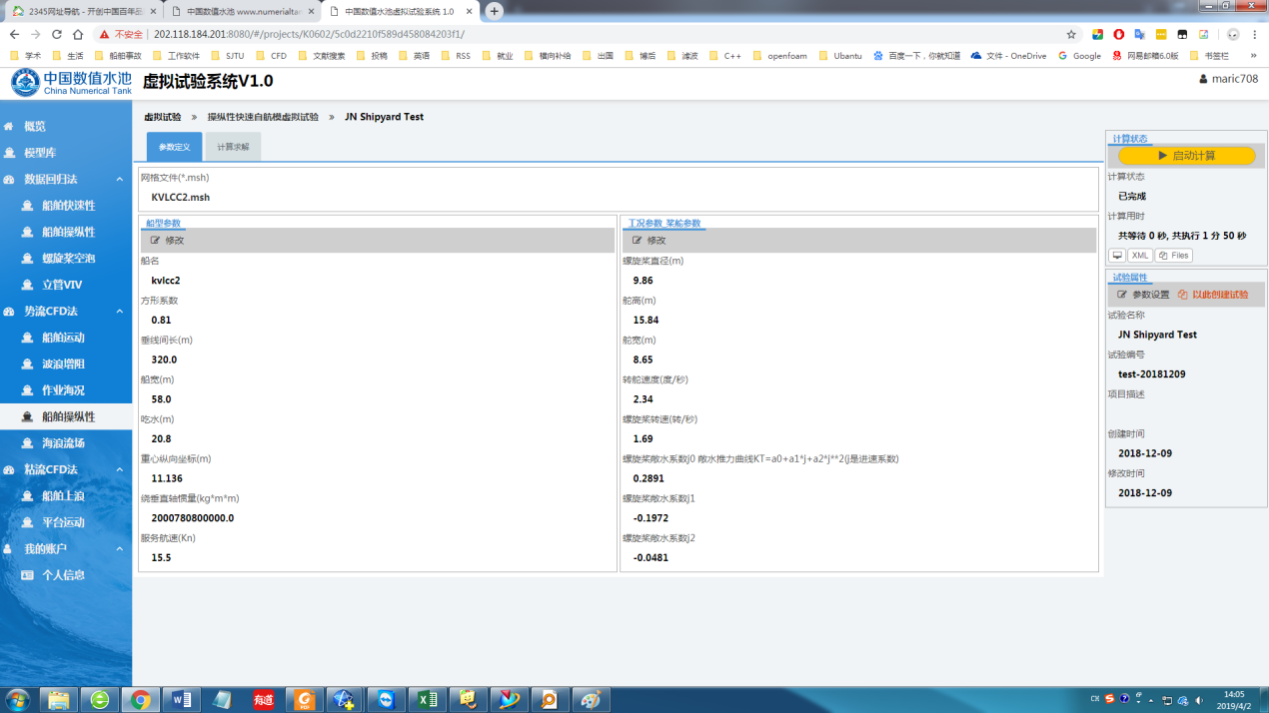
全部参数正确设置后,可启动求解器进行计算。如下图所示红色方框内,求解器的启动及计算状态展示在整个页面的右下方。
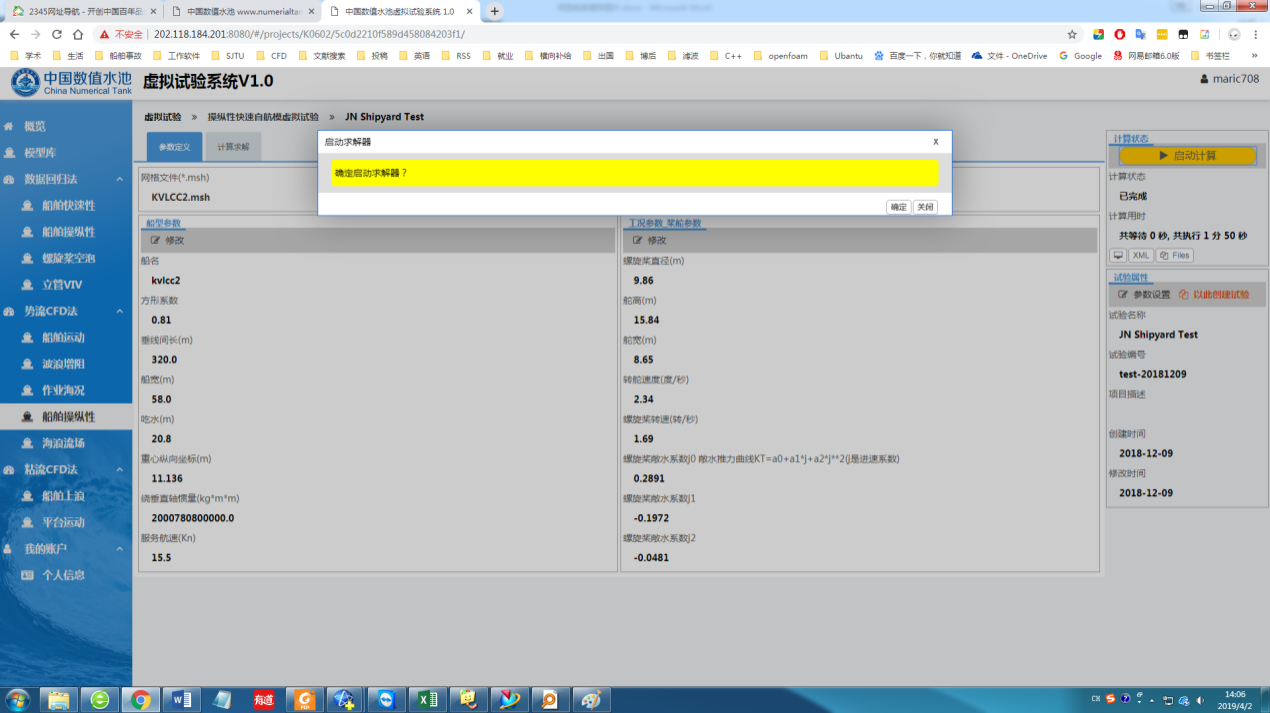
如下图所示,点击“启动计算”按钮,会弹出启动确认对话框,点击确定按钮即可启动计算。
如果用户录入的参数不符合计算条件时,计算将无法启动,并会弹出对话框进行提示,请用户按照提示的要求来填写相关的参数,以确保试验能够正确,顺利的进行。
4 结果展示
当求解器执行结束后,可切换到“输出”标签对应的页面来看本次虚拟试验的结果,试验结果可分为以下几类:
4.1 虚拟试验报告
4.2 曲线类
参考资料
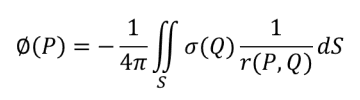
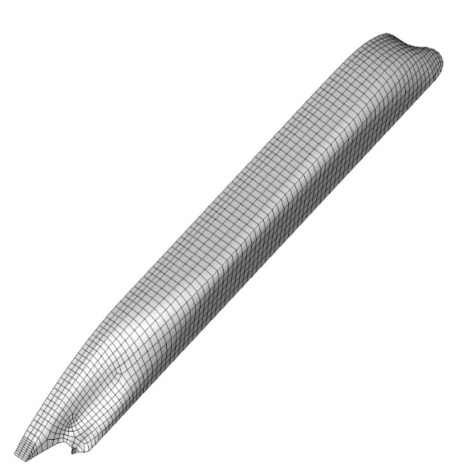
开始试验将船体表面、岸壁表面和围绕船体的部分自由面分别划分成有限个单元(面元),在每一个面元上布置强度相等的Rankine源。若将船体表面、岸壁表面和自由表面分别离散为N B、N W和N F个面元,则流场的扰动速度势等于这些面元上的面源的扰动速度势之和,可得流场中任意一点P(x, y, z)的速度势的离散形式。
将边界面离散成N个面元,并在每个面元上布置等强度的源(汇)之后,应用边界条件,只需在每个面元的配置点上满足边界条件,便可以得到一个决定源强的线性方程组,解之可得到N个未知源强,然后用给出的相关公式计算水动力。由于自由面条件是非线性的,因此先将自由面条件作一阶泰勒展开,得到迭代格式,通过迭代的方式来逐步满足自由面条件,得到近似的非线性解。
自由面边界方程中不仅含有非线性项,而且须在未知的波面上满足,因此须对这些非线性自由面条件作线性化处理,得到迭代格式,然后用迭代的方法逐步满足非线性自由面边界条件。
对于自由面流动问题,除了满足物面条件和自由面条件外,还须满足一定的辐射条件。在采用三维Rankine源面元法的兴波问题数值计算中,非线性问题的辐射条件一般只能通过采用某种数值方法来满足。通常有两种做法:一种是对自由面条件中速度势的导数用上游差分来近似,一种是由Jensen提出的“网格错位”方法,将自由面源层上置一定高度,并将离散的网格相对于相应的配置点沿纵向向后错位一定的距离。这两种数值方法都不会增加待求未知数的个数,且能较好地满足远前方无波的辐射条件。本系统即采用“网格错位”方法满足辐射条件,将自由面源层上置一定的高度,并用点源来代替面元上的源分布,点源相对于相应的配置点向后错位一定距离。
咨询电话:0451-82569306
版权所有:数值水池 信息维护:数值水池创新团队 地址:哈尔滨市南岗区南通大街145号 邮编:150001
联系我们:nwt@hrbeu.edu.cn;zhaobin2_1984@163.com 黑ICP备17002841号-10 公安备案号:23010302000541