

约束模与自航模虚拟试验
Captive and Self-propulsion Ship Resistance Virtural Test试验介绍
开始试验1.功能介绍
本产品是基于动网格技术的有限体积法,计算高效,融合了参数设置专家智慧,操作简单易用,满足详细设计阶段船舶操纵性评估需求。
主要功能有:
船舶斜航、纯横荡和纯摇首虚拟试验;
回转特征参数预报;
Z形试验特征参数预报;
适用于集装箱船、散货船和油船等主力船型;
2.产品特色
本产品是基于动网格技术的有限体积法,采用非结构化网格:
网格生成简单、高效,接口多样;
实现千万级网格高效并行计算;
不同船型计算稳定性好。
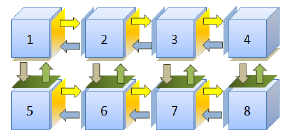
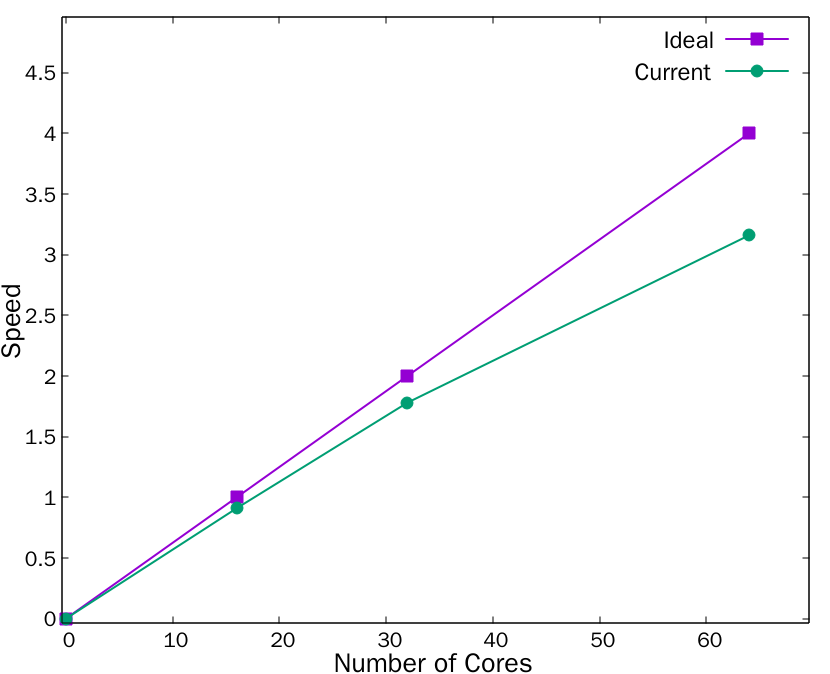
(1)本产品使用MPI库进行并行通讯,重叠网格DCI和CFD求解实现完全并行化,本产品并行效率较高,100万网格,64核加速比0.8左右。
(2)试验结果分析
可给出操纵特征参数;
试验报告自动生成;
3.运行环境和效率
主流PC机上即可运行;Windows操作系统,高性能计算集群上也可运行。 Windows操作系统,采用虚拟化技术,动态分配资源,满足计算所需。 计算速度快,PC机上计算单条船约30天内完成。
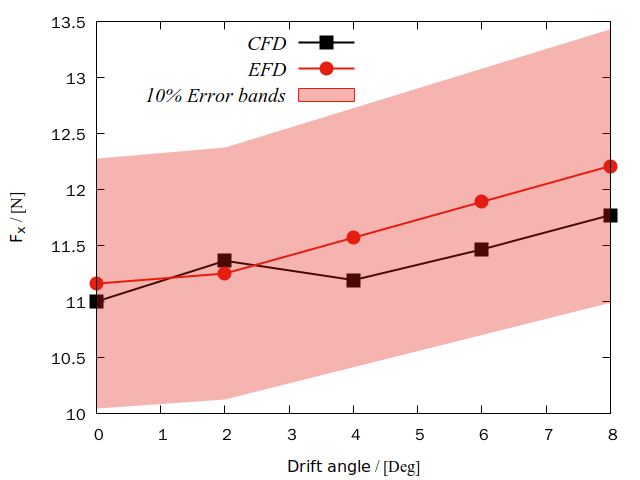
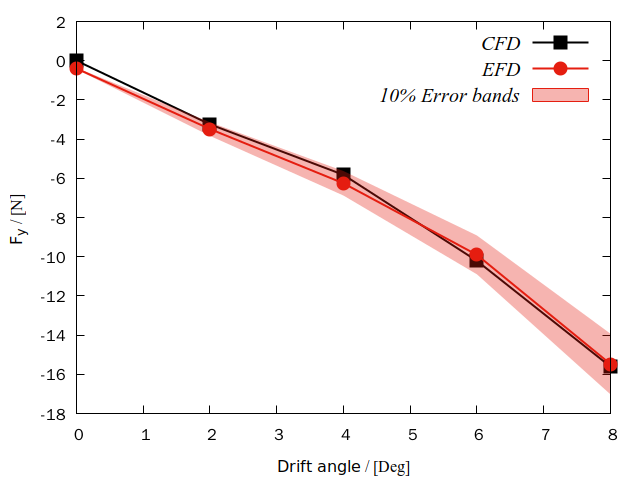
4.试验精度
测试结果获得了国际标模、项目组标模等物模试验验证。计算结果与国际标模KVLCC2相比,约束模计算结果在5%以内,纵距、战术直径和超越角的计算精度分别在10%和2度以内。
典型案例
开始试验典型案例(一)
1.1 案例名称
约束模与自航模虚拟试验-油船
1.2 案例描述
试验油船为KVLCC2油船
1.3 试验结果
① 左回转-纵距、回转直径
② 右回转-纵距、回转直径。
③ 左10°z形试验,第一超越角度和第二超越角。
④ 右10°z形试验,第一超越角度和第二超越角。
⑤ 左20°z形试验,第一超越角度。
⑥ 右20°z形试验,第一超越角度。
⑦ 停船试验,纵距、横偏和迹程。
1.4 重要模型和参数
| 项目 | 值 |
|---|---|
| 垂线间长LPP(m) | 320.0 |
| 船宽B(m) | 58.0 |
| 艏吃水Tf(m) | 20.8 |
| 尾吃水Tf(m) | 20.8 |
| 船体惯性矩Ixx,Iyy,Izz | 0.35,0.25,0.25 |
| 物体重心位置坐标(m) | 160.0,0.0,18.6 |
| 方形系数CB | 0.809 |
| 航速VS(kn) | 15.5 |
| 项目 | 值 |
|---|---|
| 桨径DP(m) | 9.86 |
| 桨转速nP (rpm) | 101.4 |
| 项目 | 值 |
|---|---|
| 舵高HR (m) | 15.84 |
| 舵面积SR (m) | 136.7 |
| 操舵速度(°/s) | 2.34 |
1.5 部分试验结果展示
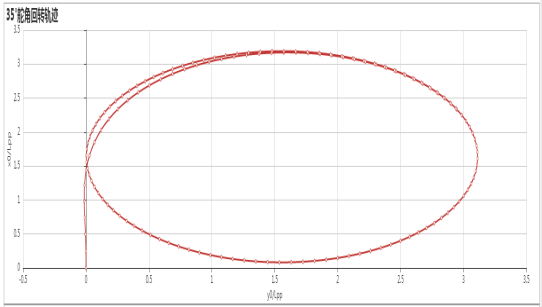
回转试验进行了舵35°试验。试验中给出了船舶重心点运动轨迹和回转中的战术直径、回转直径、纵距并给予相应的检验。
| 试验项目 | 试验值 | IMO标准 |
|---|---|---|
| 战术直径 | 2.94LPP | <5.0 LPP |
| 回转直径 | 3.11LPP | - |
| 回转纵距 | 2.84LPP | <4.5 LPP |
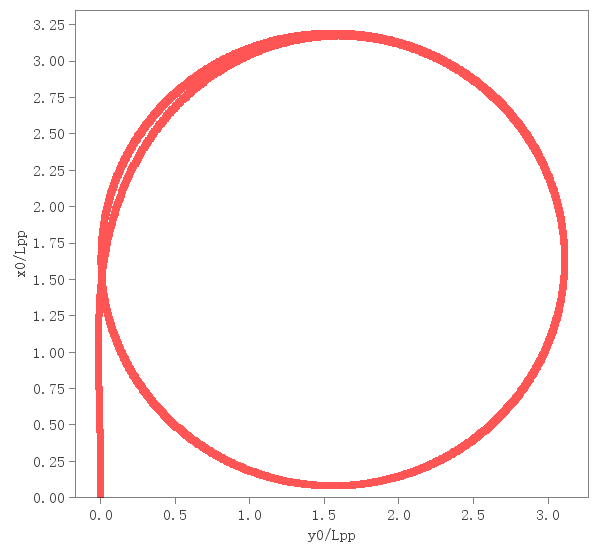
35°舵角回转轨迹

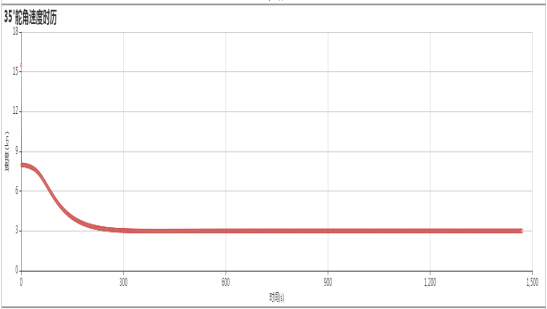
35°舵角速度时历
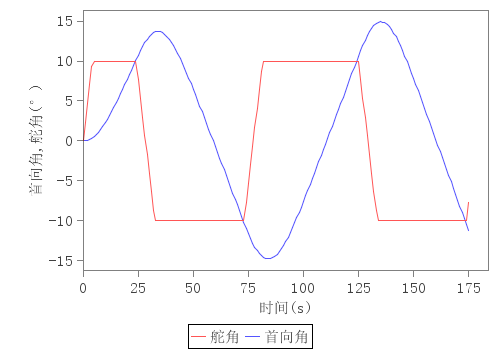
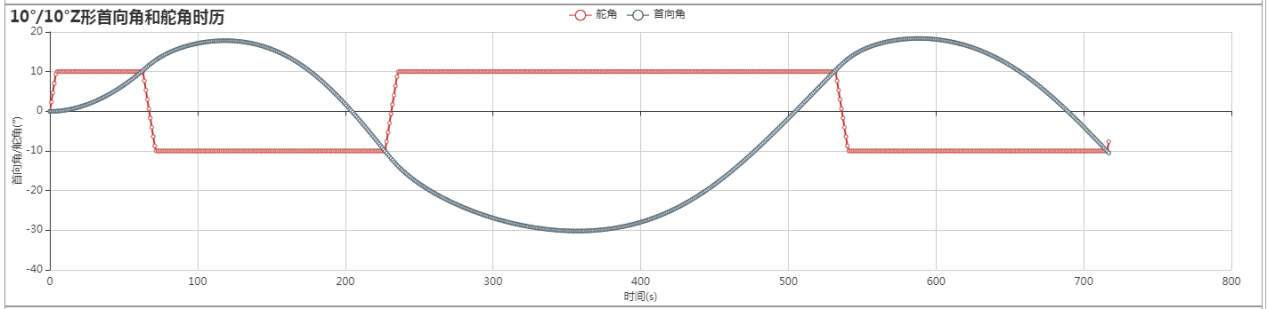
10°/10°和20°/20°z形试验的试验结果。
| 试验项目 | I试验值 | IMO标准 | |
|---|---|---|---|
| 10°/10° | 第一超越角(°) | 7.81 | <20 |
| 第二超越角(°) | 20.19 | <40 | |
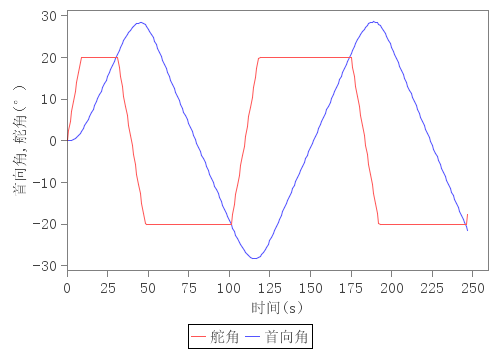
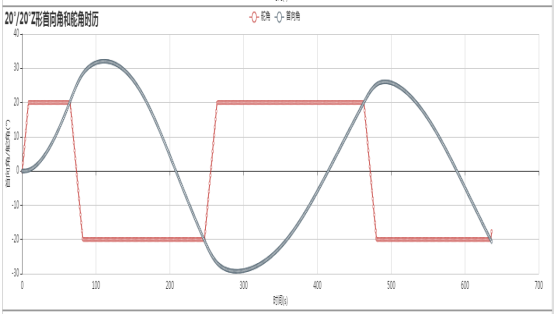
| 20°/20° | 第一超越角(°) | 12.05 | <25 |
| 第二超越角(°) | 9.28 | - |
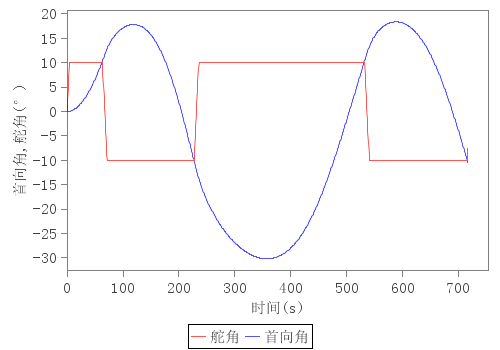
10°/10°Z形首向角和舵角时历
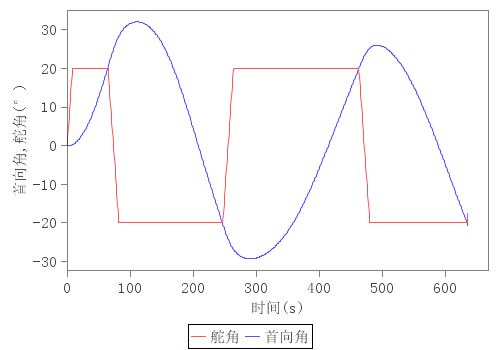
20°/20°Z形首向角和舵角时历
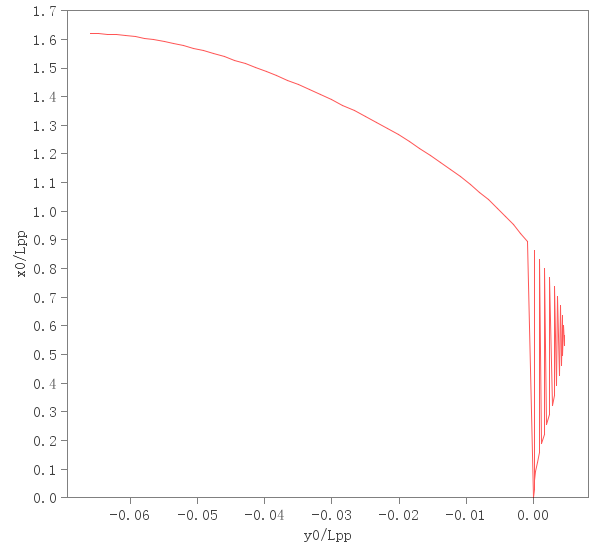
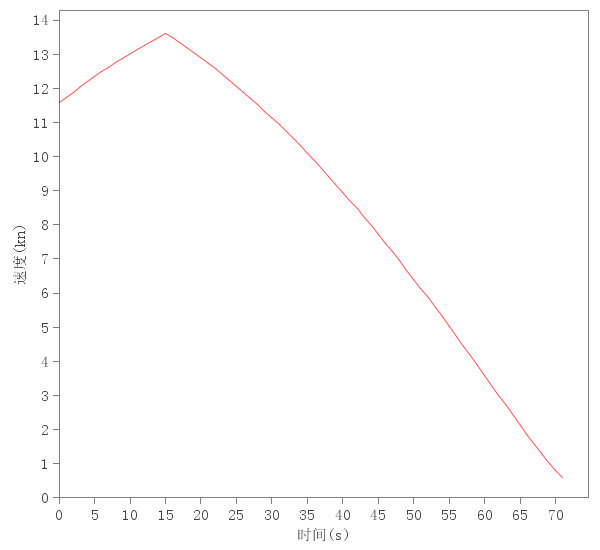
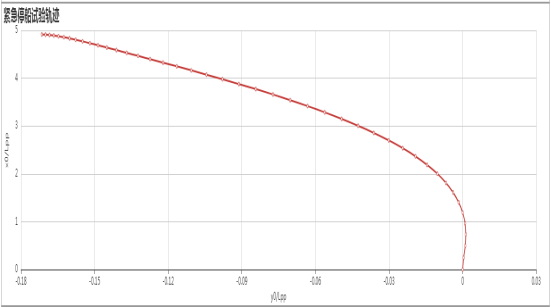
紧急停船试验中测定自正车停止开始至停船的轨迹,见下表和下图。
| 试验项目 | I试验值 | IMO标准 |
|---|---|---|
| 停船时间(s) | 28.1 | - |
| 纵距(/Lpp) | 4.91 | - |
| 横偏(/Lpp) | 0.17 | - |
| 迹程(/Lpp) | 4.92 | <15 |
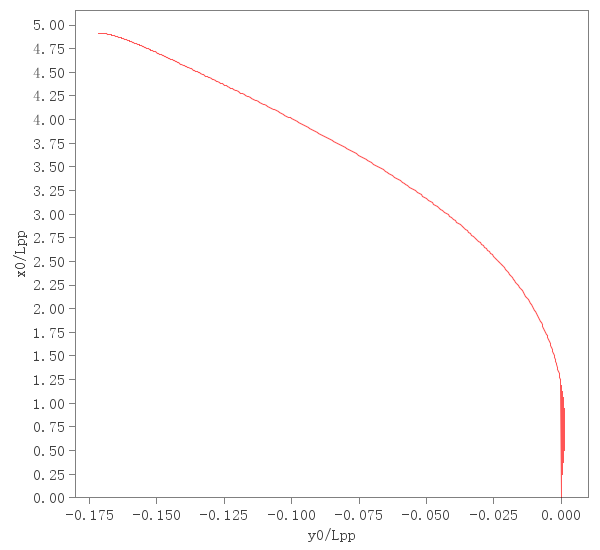
紧急停船试验轨迹
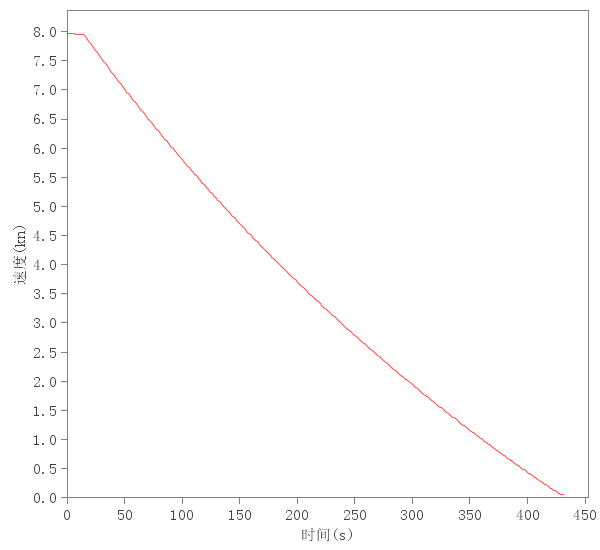
紧急停船速降时历
典型案例(二)
1.1 案例名称
约束模与自航模虚拟试验-育鹏轮
1.2 案例描述
试验散货船为育鹏轮
1.3 试验结果
① 左回转-纵距、回转直径
② 右回转-纵距、回转直径。
③ 左10°z形试验,第一超越角度和第二超越角。
④ 右10°z形试验,第一超越角度和第二超越角。
⑤ 左20°z形试验,第一超越角度。
⑥ 右20°z形试验,第一超越角度。
⑦ 停船试验,纵距、横偏和迹程。
1.4 重要模型和参数
| 项目 | 值 |
|---|---|
| 垂线间长LPP(m) | 193.2 |
| 船宽B(m) | 27.8 |
| 艏吃水Tf(m) | 10.3 |
| 尾吃水Tf(m) | 10.3 |
| 船体惯性矩Ixx,Iyy,Izz | 0.35,0.25,0.25 |
| 物体重心位置坐标(m) | 96.6.0.0 |
| 方形系数CB | 0.721 |
| 航速VS(kn) | 18.0 |
| 项目 | 值 |
|---|---|
| 桨径DP(m) | 6.7 |
| 桨转速nP (rpm) | 103 |
| 项目 | 值 |
|---|---|
| 舵高HR (m) | 15.84 |
| 舵面积SR (m) | 136.7 |
| 操舵速度(°/s) | 2.34 |
1.5 部分试验结果展示
回转试验进行了舵35°试验。试验中给出了船舶重心点运动轨迹和回转中的战术直径、回转直径、纵距并给予相应的检验。

35°舵角回转轨迹
10°/10°Z形首向角和舵角时历
20°/20°Z形首向角和舵角时历
紧急停船试验轨迹
紧急停船速降时历
操作指南
开始试验用户登录中国数值水池虚拟试验系统后,可完成系统提供的各类虚拟试验。虽然试验在参数、求解器、计算结果等方面区别很大,但总体上来说操作过程基本相同,主要由四个部分组成:1试验创建;2参数录入(前处理);3计算求解;4结果展示(后处理)。
登录系统后,点击页面左侧导航栏中的“船舶操纵性”,从而进入该试验的管理页面。如下图所示,该页面有关于船舶操纵性预报的主要功能介绍,以及该虚拟试验的相关特色,其下为“我的试验”。
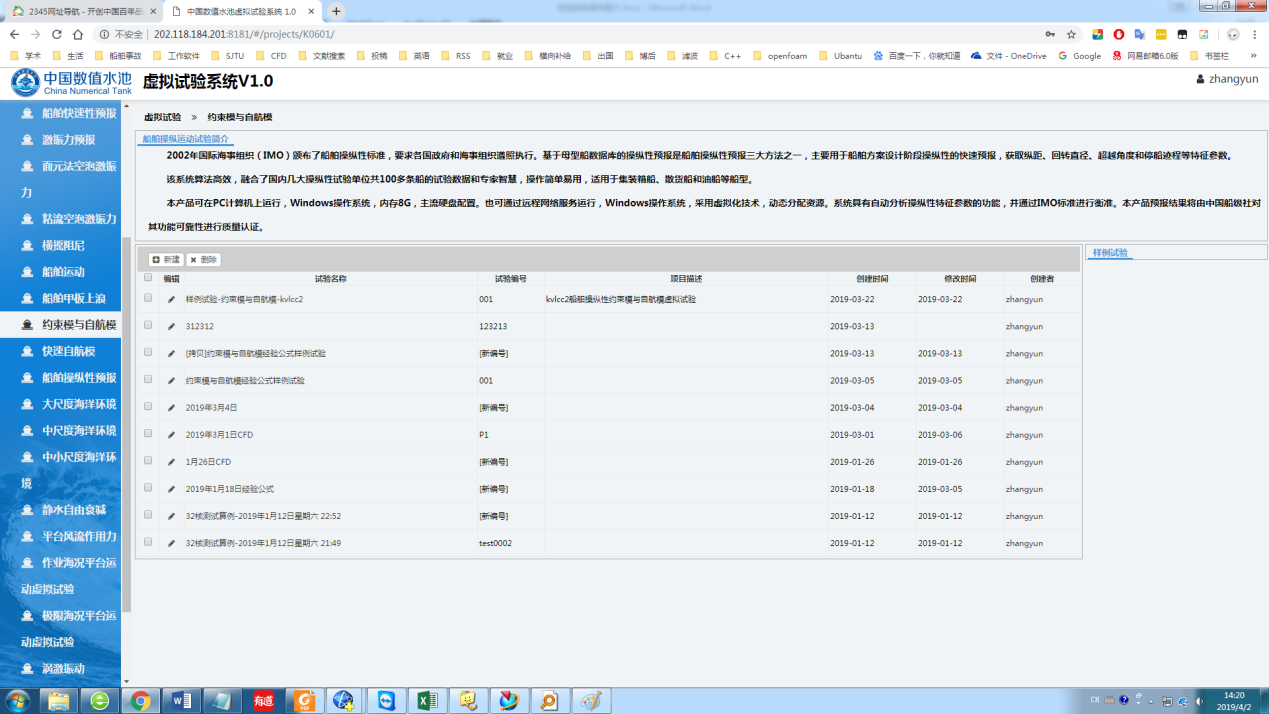
“我的试验”中给出用户做过的试验列表,该列表以时间顺序排序,可以在看到用户做的每一个虚拟试验的概要信息,如试验名称、编号、描述、创建时间、修改时间等内容,用户可在这里对试验进行创建核删除操作。
页面的右侧是船舶操纵性预报的“样例试验”,如下图所示。样例试验是系统提供的已经完成的典型试验,对系统中的所有注册用户开放,可给用户提供一定的参考,从而更好地完成自己的虚拟试验。
点击“样例试验”后,则进入样例试验的详情界面,可以看到样例试验的参数设置、求解器的执行信息及试验的结果。这里,用户可以查看样例的所有信息,但不可以修改。
1.试验创建
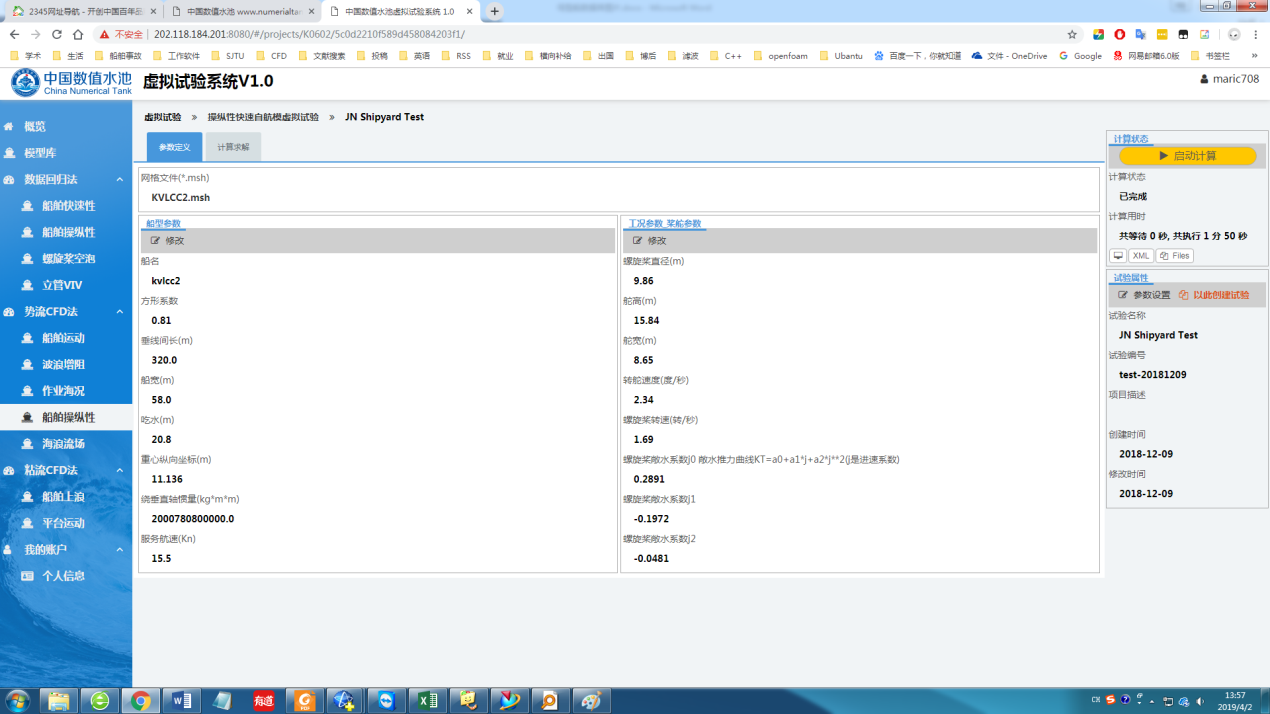
系统提供了两种创建虚拟试验的方法,第一种是通过某个虚拟试验为范本来创建虚拟试验。如下图所示,点开某个虚拟试验的详情页面,在这个页面的右侧用红色字体标出的字样“以此创建试验”,则弹出创建新试验的对话框,输入适当的试验名称、编号及描述,点击确定即可完成新试验的创建。
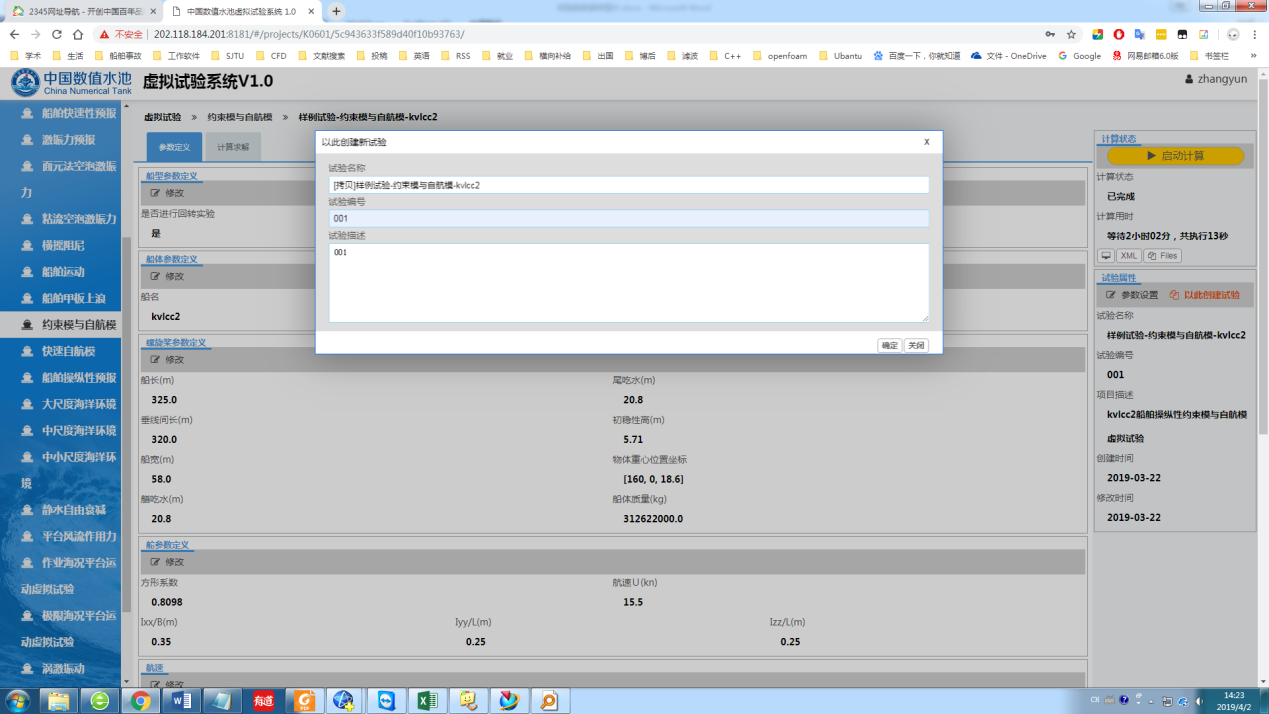
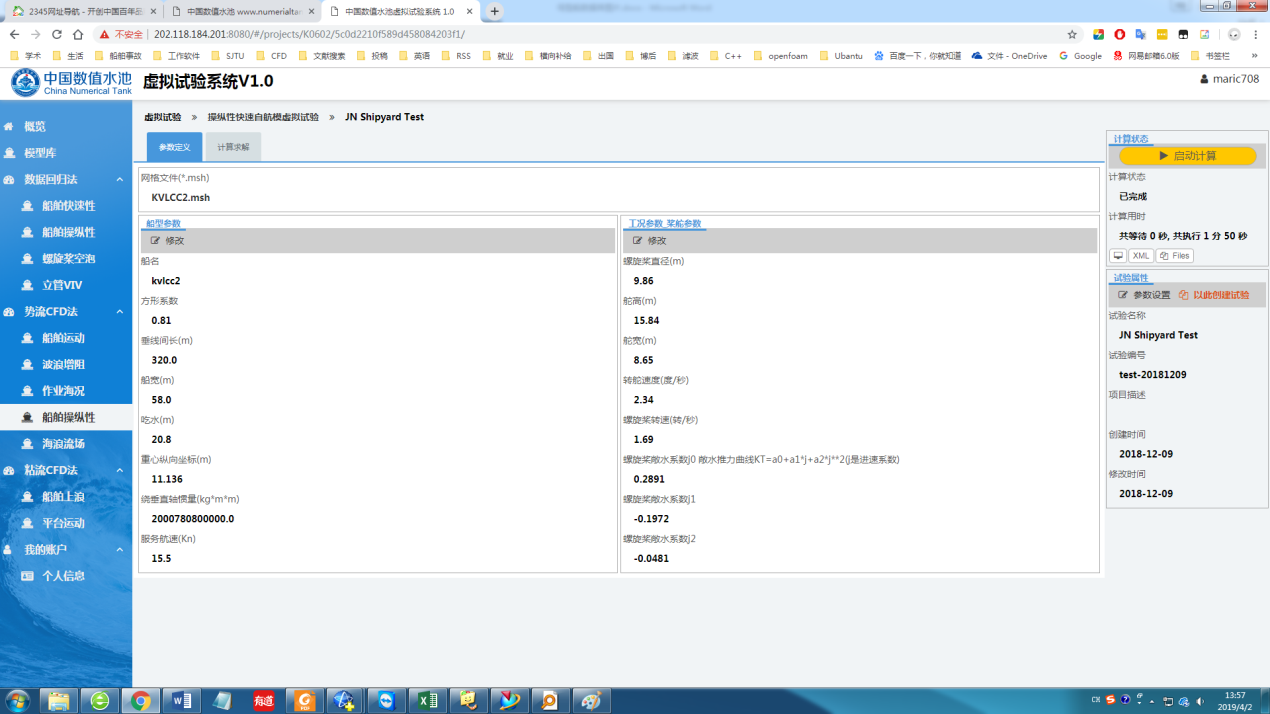
如下图所示,新试验创建后桨自动跳转到该试验的详情页面,可见通过这种方式创建的新试验是样例试验的一个拷贝,其参数与样例试验相同,用户只需按实际情况修改部分参数即可。因此,可将当前虚拟试验看成试验模板,起到初始化设定新试验参数的作用,系统推荐通过这样的方式来创建新的虚拟试验。
第二种创建新试验的方法是创建一个空白试验。如下图所示,通过点击“船舶操纵性预报”中虚拟试验列表上方的“新建”按钮,同样会弹出对话框如下图。填入相应的信息,然后点击确定,即可创建一个新的空白试验。
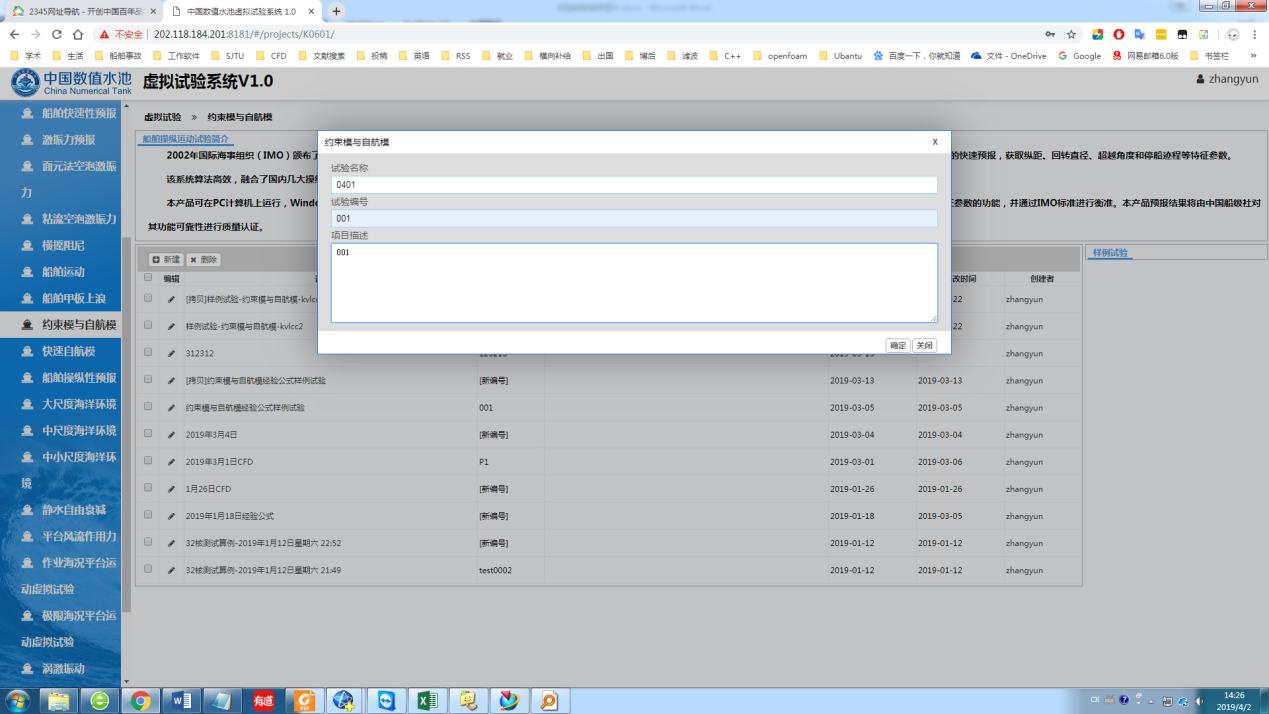
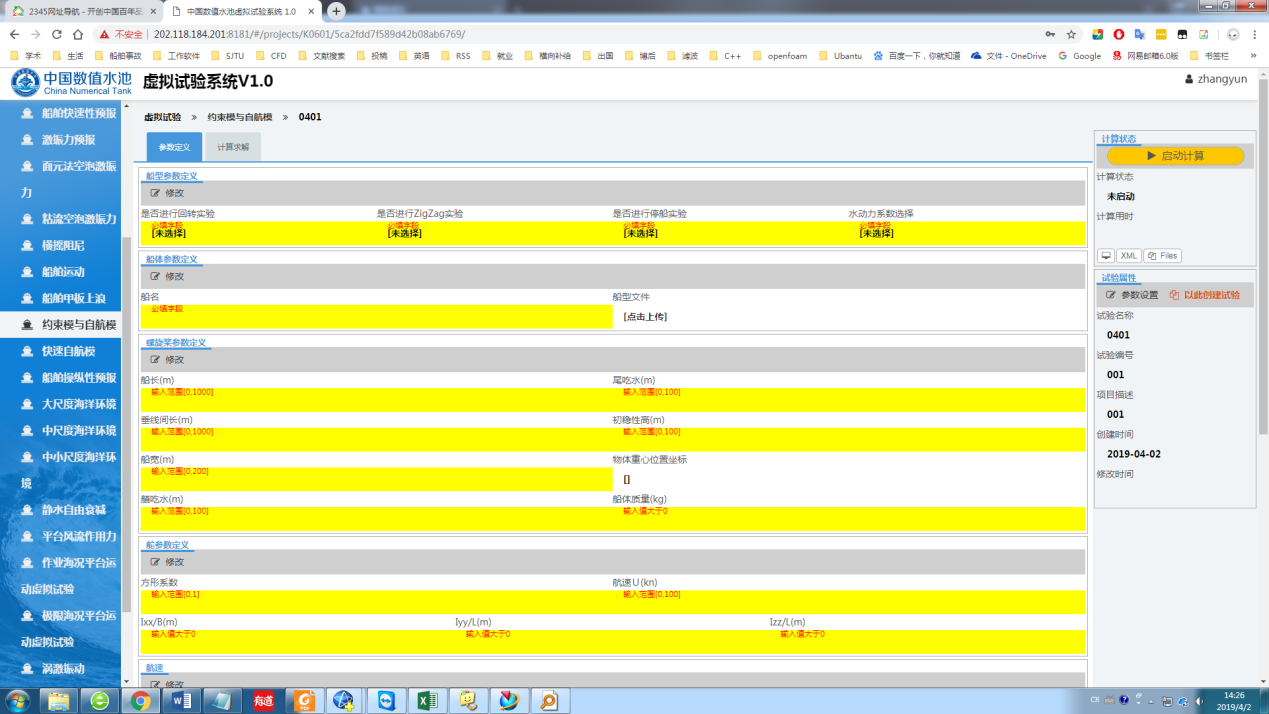
如下图所示,新空白试验创建后,同样会自动跳转到该虚拟试验的详情页面。可见通过该方法创建的所有虚拟试验都是空白,需要用户手动输入所有的必填参数,方可进行计算,该方法适用于有一定经验的用户。
2. 参数录入
当一个新的虚拟试验创建口,用户需要对其参数进行适当的录入或修改,为确保结果的准确,请确认所录入的参数符合实际情况。一个虚拟试验可大致分为文件型参数、单数值型参数、表格型参数几种类型,介绍一下各种类型参数的录入方式。
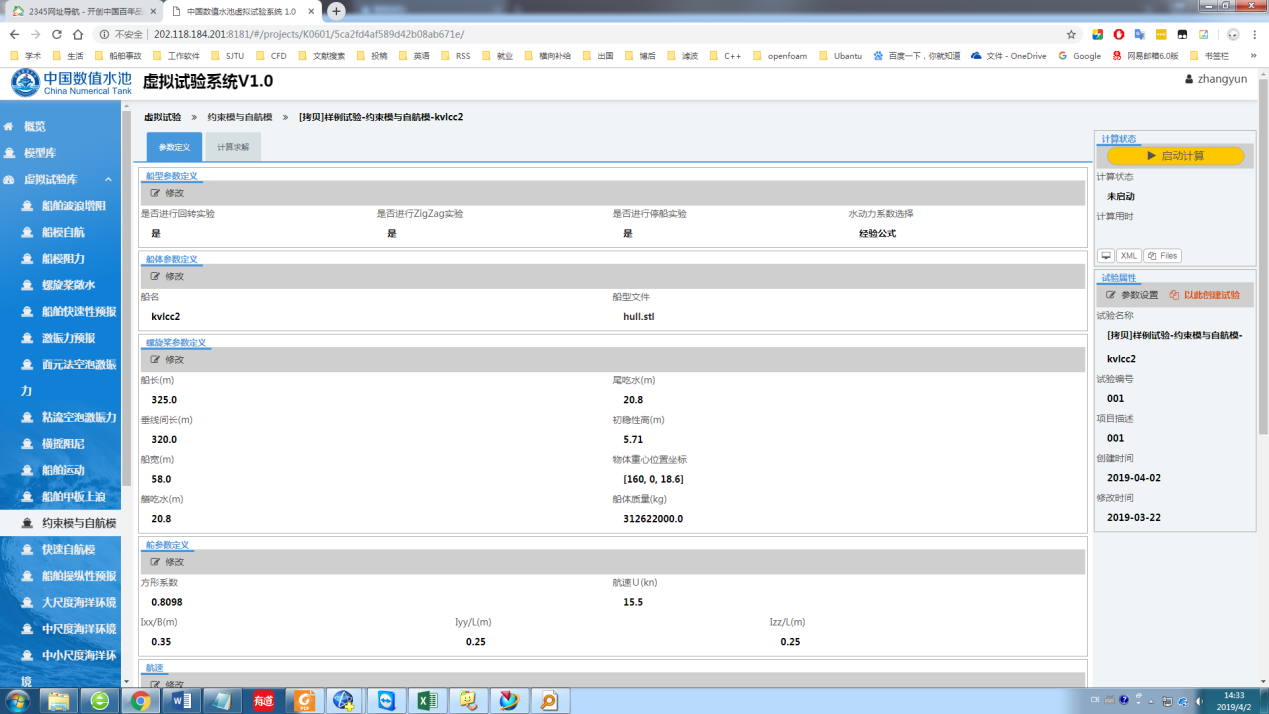
2.1 船型参数
在“输入”标签中,点击“船型参数”小标签下方的“修改”按钮,可进入如下图所示页面,可以进行与船型相关参数的设置。按照所提示的信息输入正确的船型参数。其中船舶类型为下来菜单,不需要用户输入,其余参数都需要用户手动输入。



2.2 螺旋桨参数
点击“螺旋桨参数”小标签下方的“修改”按钮,可进入如下图所示页面,可以对螺旋桨相关的参数进行设置,以下所有参数都需要用户手动输入。
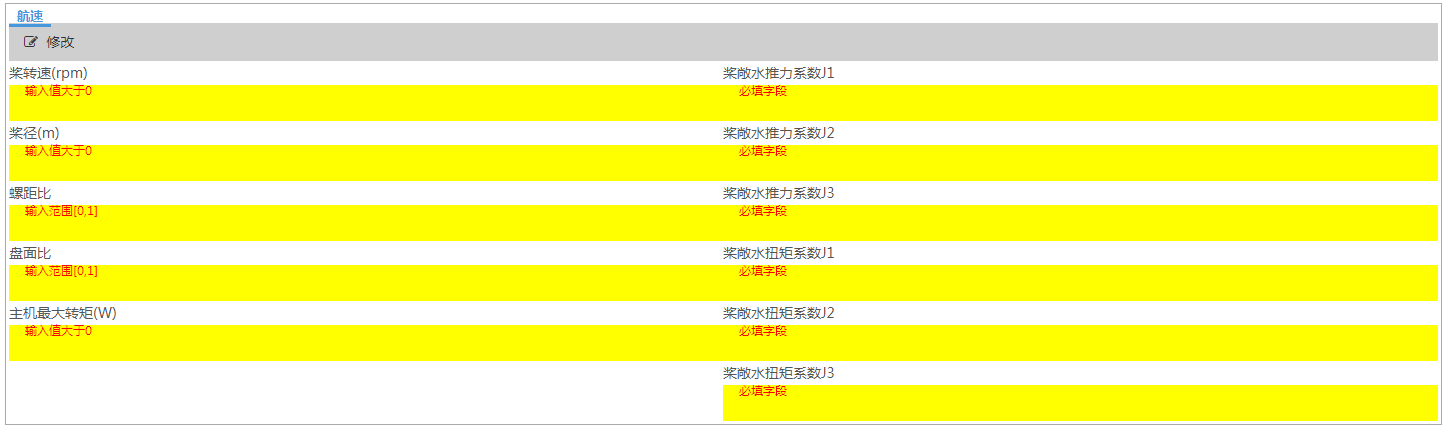
2.3 舵参数
点击“舵参数”小标签下方的“修改”按钮,可进入如下图所示页面,可以对舵相关的参数进行设置,以下所有参数都需要用户手动输入。

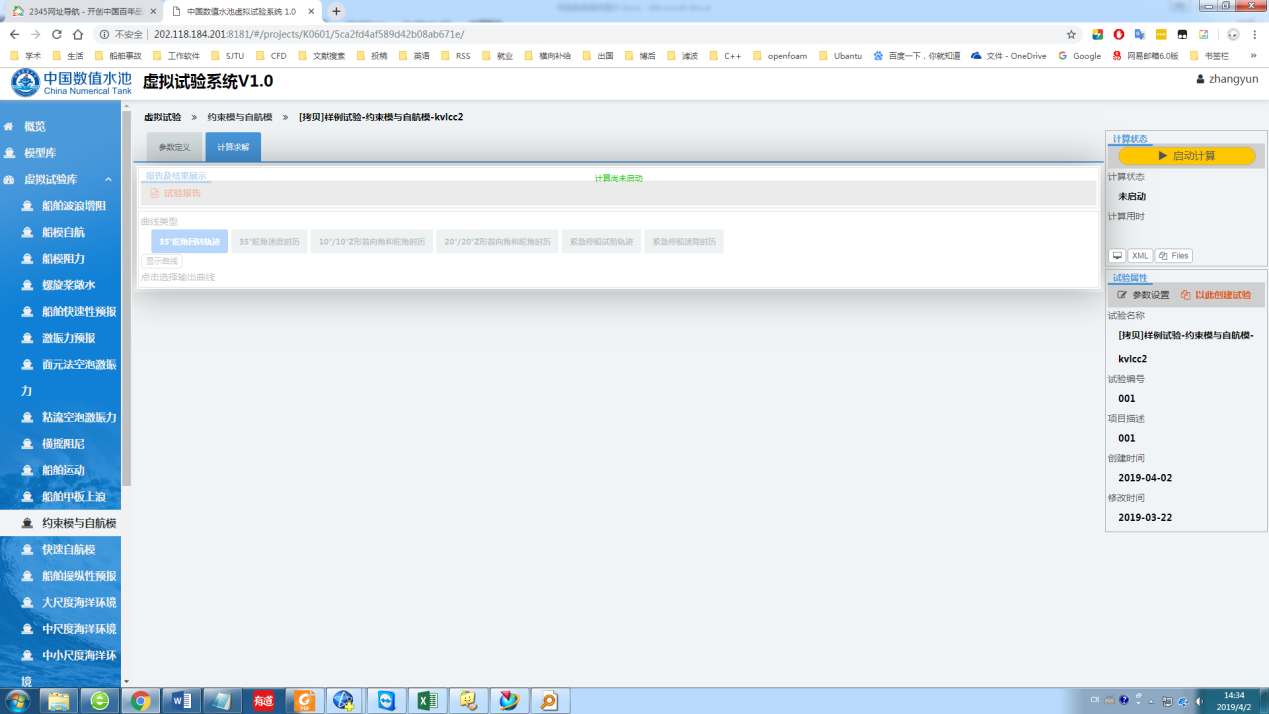
3. 计算求解
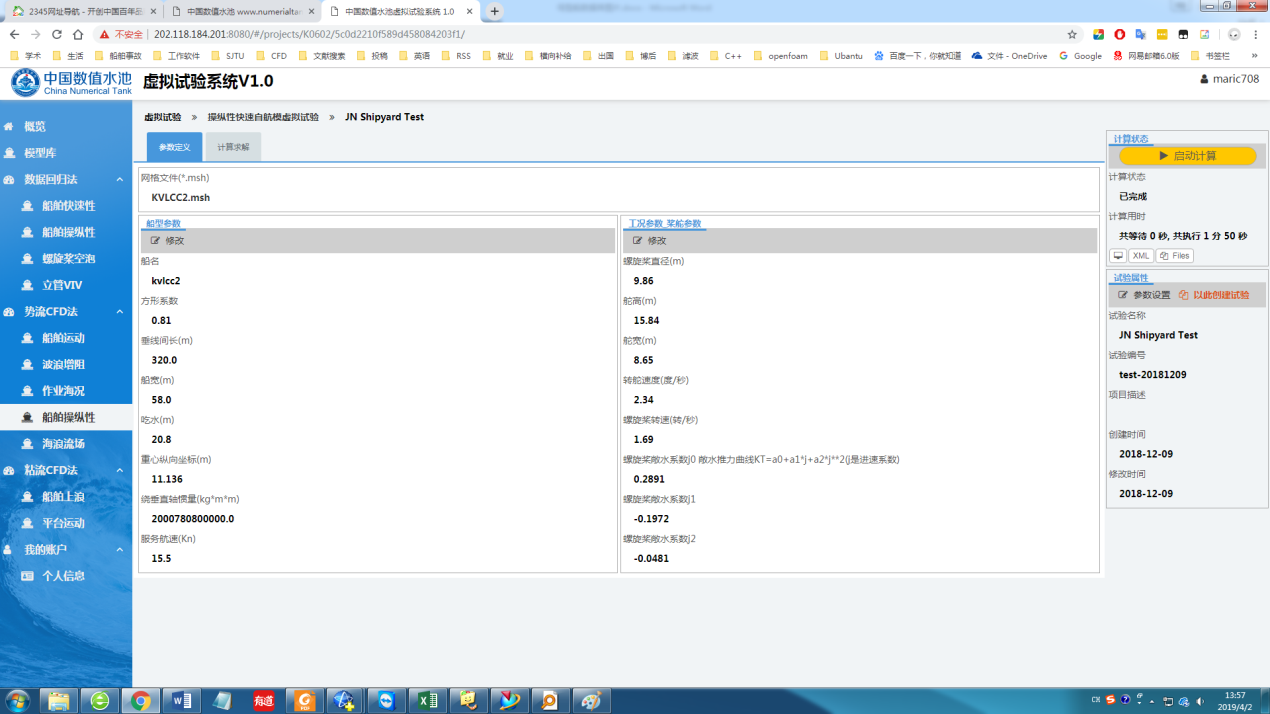
全部参数正确设置后,可启动求解器进行计算。如下图所示红色方框内,求解器的启动及计算状态展示在整个页面的右下方。
如下图所示,点击“启动计算”按钮,会弹出启动确认对话框,点击确定按钮即可启动计算。
如果用户录入的参数不符合计算条件时,计算将无法启动,并会弹出对话框进行提示,请用户按照提示的要求来填写相关的参数,以确保试验能够正确,顺利的进行。
4 结果展示
当求解器执行结束后,可切换到“输出”标签对应的页面来看本次虚拟试验的结果,试验结果可分为以下几类:
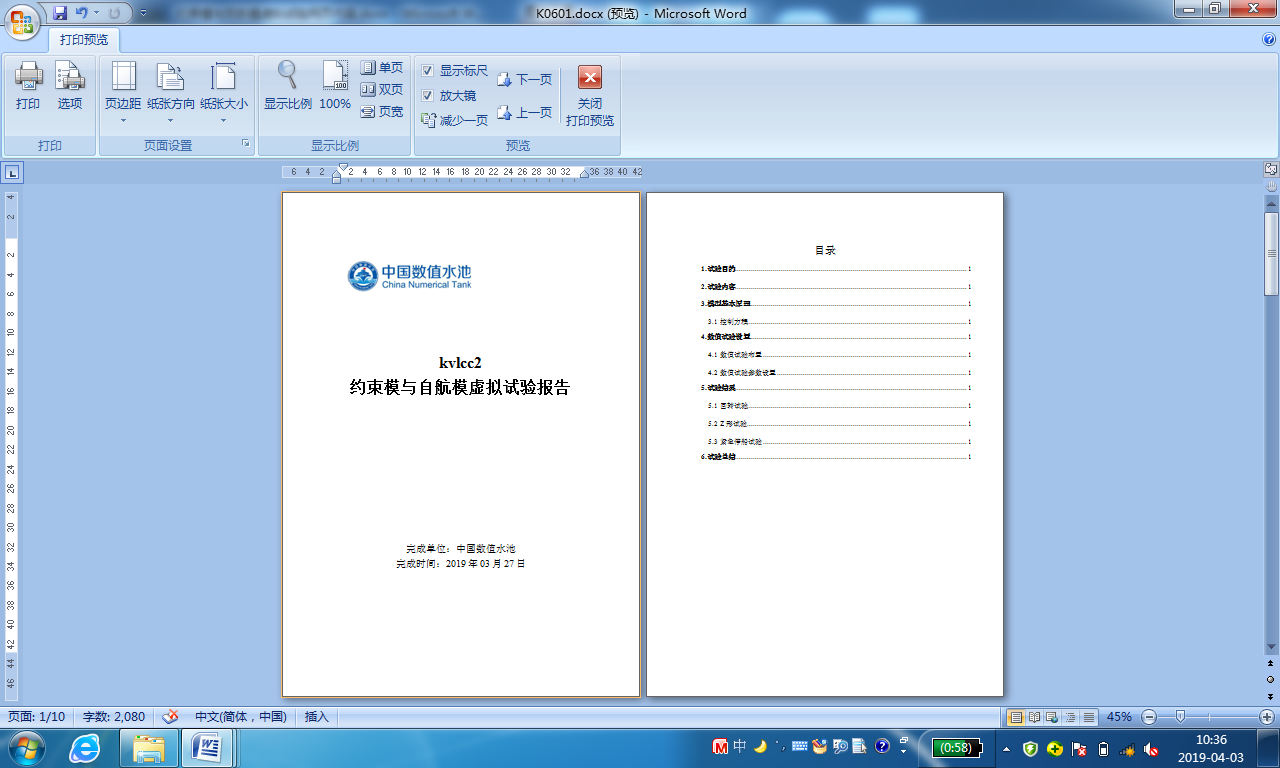
4.1虚拟试验报告
4.2曲线类

参考资料
开始试验求解器中采用的控制方程为不可压的两相RANS(Reynolds-Averaged Navier-Stokes)方程,控制方程中的速度压力的耦合是通过PISO(Pressure Implicit with Splitting of Operator)算法来求解。采用带有人工压缩技术的VOF法(Volume of Fluid)来捕捉自由界面的变化。在OpenFOAM中采用SST(ShearStress Transport) 模型。该模型通过剪应力输运 (Shear Stress Transport, SST)公式结合当前两种主流的二方程湍流模型,模型以及标准
模型。该模型通过剪应力输运 (Shear Stress Transport, SST)公式结合当前两种主流的二方程湍流模型,模型以及标准 模型的优点。
模型的优点。
RANS方程(1和2)和VOF输运方程(3)都采用有限体积法来进行离散,计算域离散成一系列小单元,计算流场信息存储在网格单元中心,再根据单元中心的值插值即可得单元面的值。最后根据Gauss理论,把单元表面的值相加就可以得到单元体的体积积分。对不同的项采用不同的插值方法,方程(2)中的对流项采用二阶TVD有限线性法,扩散项采用二阶中心差分法,VOF方程采用Van Leer离散方法[14],时间项采用二阶向后插值方法。
本控制方程求解非定常不可压粘性流体,求解器中采用的控制方程为不可压的两相RANS(Reynolds-Averaged Navier-Stokes)方程:


其中: 为速度场;
为速度场; 为网格移动速度;
为网格移动速度; 为流体动压力;ρ为液体或者气体的密度;
为流体动压力;ρ为液体或者气体的密度;
 为重力加速度向量;
为重力加速度向量; 为有效动力粘度,其中
为有效动力粘度,其中 和
和 分别称为运动粘度和湍流涡粘度,后者由湍流模型求解而得;
分别称为运动粘度和湍流涡粘度,后者由湍流模型求解而得;
 为两相流模型中的表面张力项;
为两相流模型中的表面张力项; 为消波区域所施加的源项。
为消波区域所施加的源项。
控制方程中的速度压力的耦合是通过PISO(Pressure Implicit with Splitting of Operator)算法来求解。将方程(2)整理后得到:

S为方程(2)中剩余的所有源项:

在方程(3)中等号左端项均是以速度U为未知量的项。等号右边为压力梯度和源项。将方程(3)经过有限体积法(FVM)离散之后,可以得到以下形式:

采用带有人工压缩技术的VOF法(Volume of Fluid)来捕捉自由界面的变化。其输运方程可以定义为:

其中α为体积分数,代表每一个网格单元中液体部分所占体积的百分比,因此在所有单元中,α的值介于0和1之间:

基于体积分数α,密度ρ和动力粘度µ分别定义为:

其中:下标g和l分别代表气体和液体。
在研究船舶的六自由度运动时,常采用两个坐标系统,一个是大地坐标系,一个是船体坐标系。由数值计算得到的相关水动力系数带入分离式运动方程求解得到船舶的操纵运动。
咨询电话:0451-82569306
版权所有:数值水池 信息维护:数值水池创新团队 地址:哈尔滨市南岗区南通大街145号 邮编:150001
联系我们:nwt@hrbeu.edu.cn;zhaobin2_1984@163.com 黑ICP备17002841号-10 公安备案号:23010302000541